
Robohub.org
The award-winning Smart Trash Can moves autonomously to catch your trash
This Smart Trash Can, developed by Minoru Kurata, an engineer at a Japanese auto maker, won an Excellence Award at the Japan Media Arts Festival.
“When you toss trash at it, a sensor detects the position of the trash, and sends the information to a PC. The PC calculates where the trash will fall, and communicates it to the can via wireless connection.”
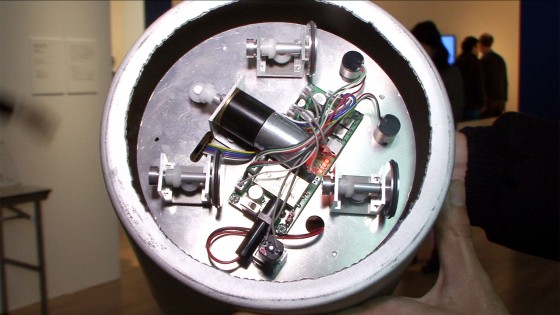
“The trash can has to move autonomously. To achieve that, I created a special mechanism, with a single axis for both the wheel rotation and the change in angle. So even if the wheels rotate, the position of the can itself doesn’t change. That mechanism, the circuitry, and the motor controller all fit within the diameter of the can. If the center of gravity is high, the can will fall over, so I made the can low, narrow, and compact, to keep the center of gravity as low as possible.”
“I’ve received inquiries about turning this into a commercial product. Right now, I’m working to patent the technology for the Smart Trash Can.”
“The probability that the trash will go in is not very high, only 10-20%. Even making full use of the current sensor, it still has errors. So I’d like to improve the success rate. I want to either improve the sensor, or upgrade the control by reducing the error through a program.”
tags: Prototype, service robot
AUAI is supported by:









