
Robohub.org
The Construct: Robot simulations in the cloud
The Construct is a Barcelona based startup created to simplify the simulation of robots. The goal is to allow anybody to simulate complex robots and environments with minimal knowledge, without having to install or maintain anything in their computer and without having to build the simulations from scratch.
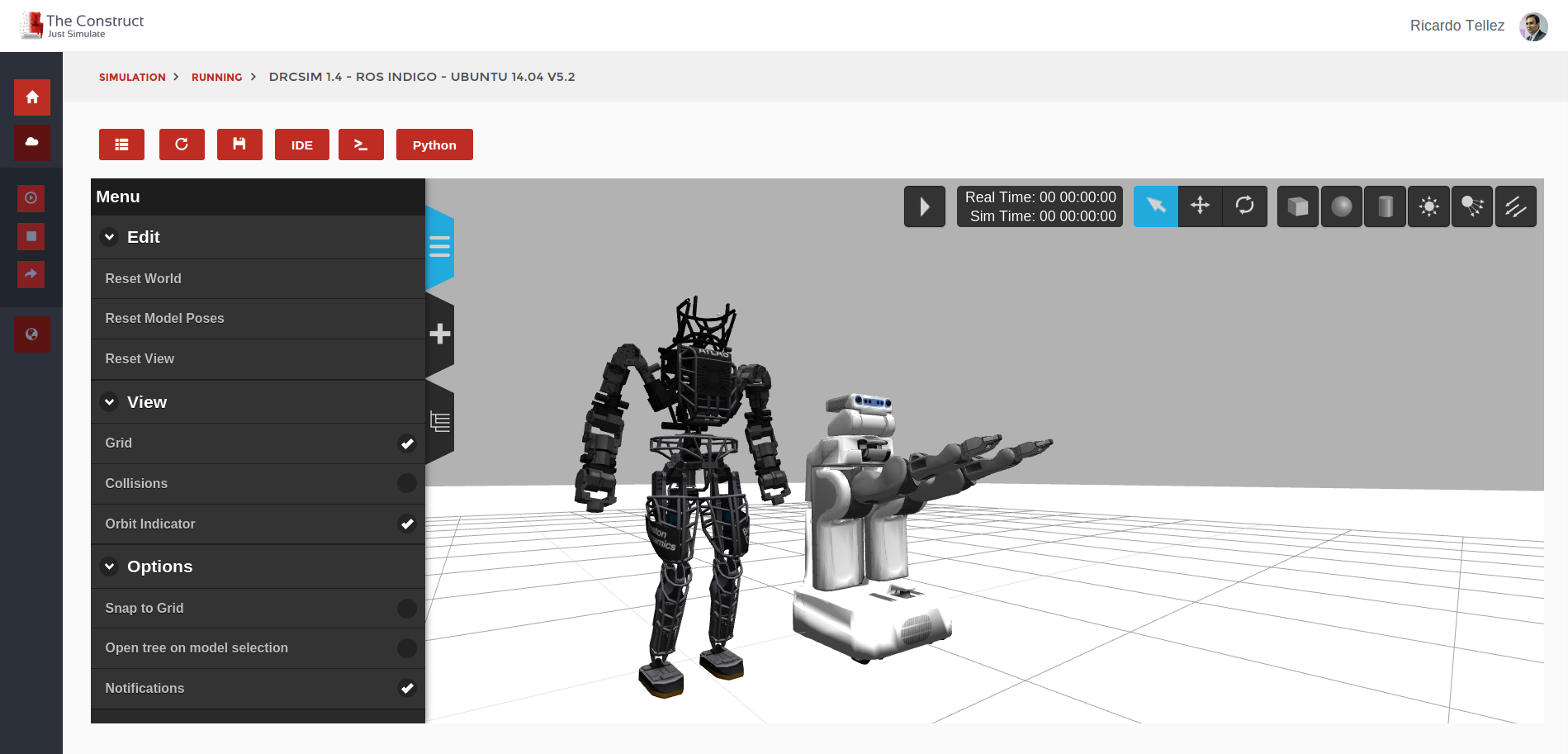
With The Construct, users run their robot simulations in the cloud, using a web browser so they don’t need to install, configure or store files on their computer. Any WebGL enabled browser will suffice.
Once logged in, users must select which simulator to run. Currently available simulators include Gazebo, Webots and DRC, and more are in the pipeline. All simulators are fully integrated with ROS (it’s not mandatory to use it though).
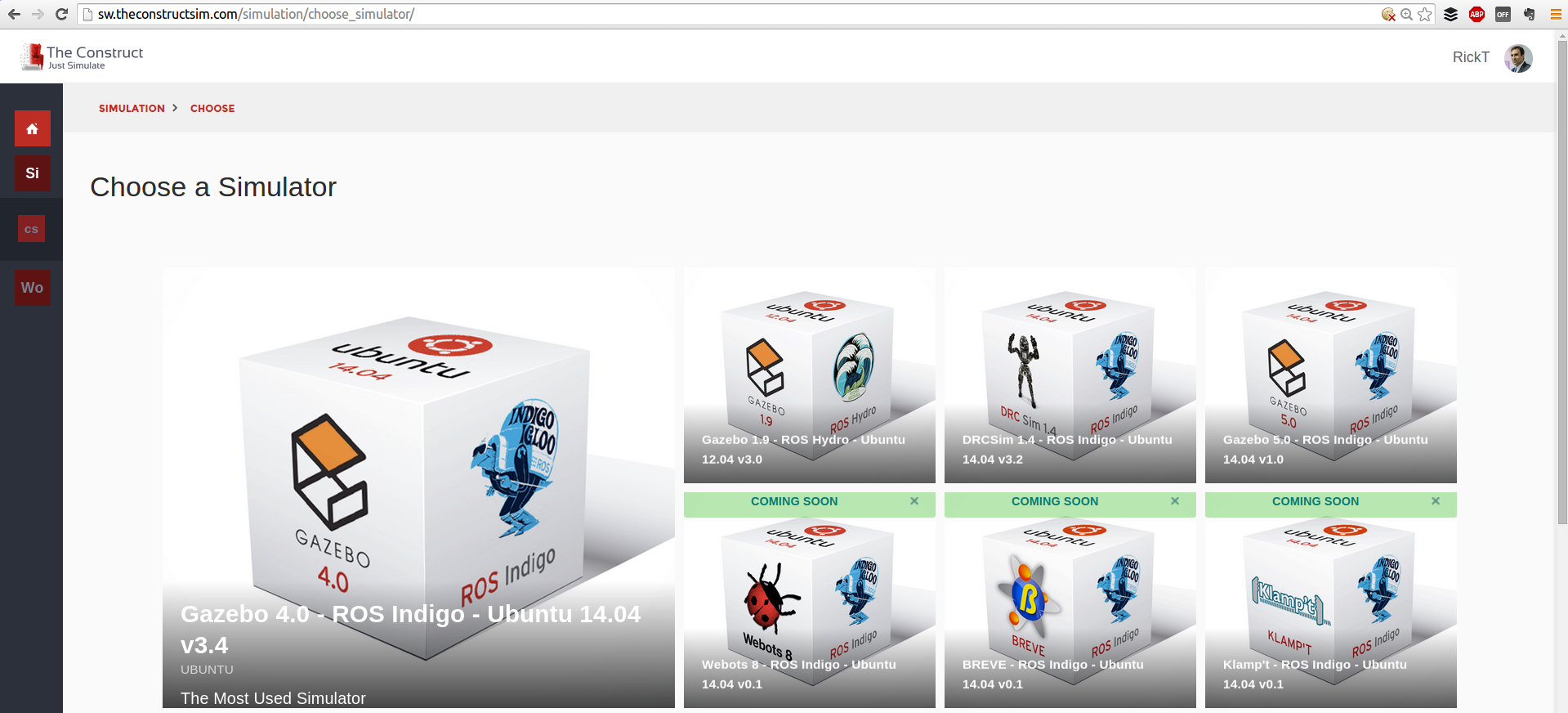
Users will also find different versions of the same simulator available. This means that they can run a Gazebo 4.0 with ROS Indigo under Ubuntu 14.04, or a Gazebo 1.9 with ROS Hydro under Ubuntu 12.04. It all depends on their needs.
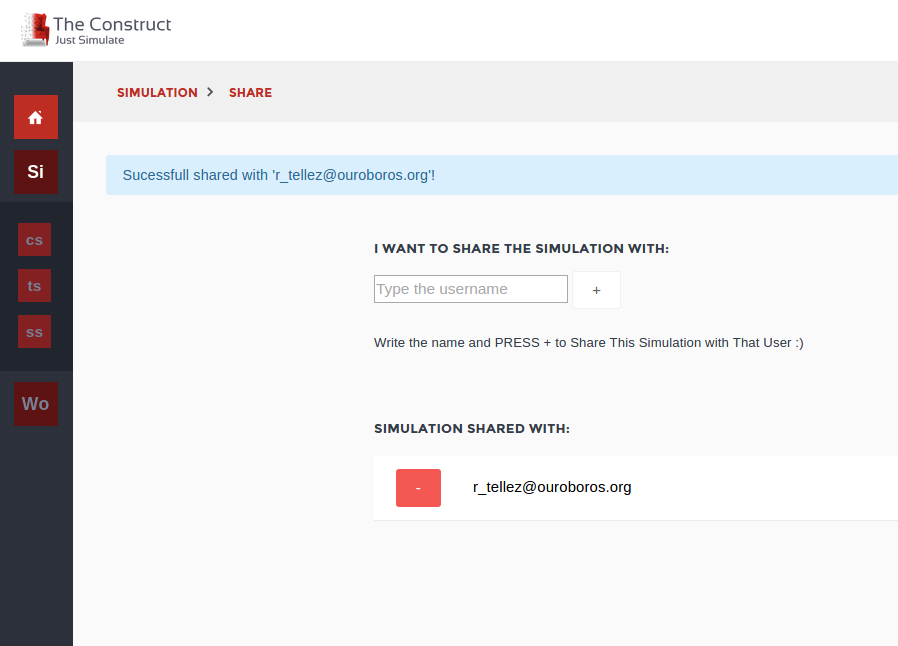
An interesting feature of The Construct is that it allows sharing of simulations, that is, users can work at the same time on the same simulation, each from their own point of view. This feature opens a lot of simulation possibilities, such as collaboration between workmates, worldwide robotics classes in real time or hosting a competition where all the participants share the same interface and resources.
The Construct running on an iPad2 (Nao robot by Aldebaran on Webots)
Since simulations are created and accessed through a web browser, users can utilize any type of computer or device – a Linux, Windows PC or Mac, a tablet or smartphone.

The Construct running on an iPhone4S (Wam arm by Barret on Gazebo)
As the cloud provides high CPU power, it is possible to simulate really big environments, such as a city, or very complex robots.
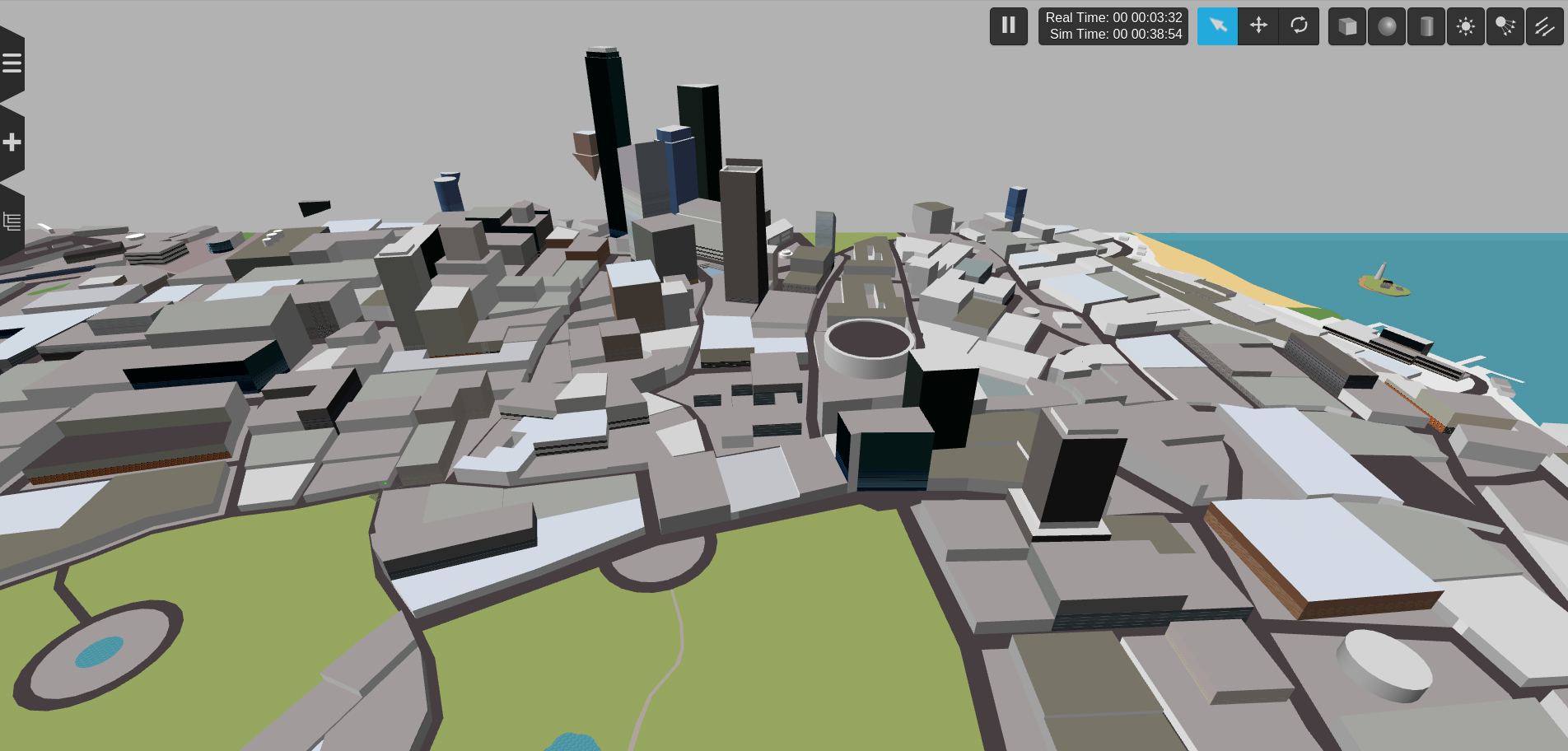
The simulation of a city, which includes the sea and an island.
Users can launch their already existing simulations in The Construct without a problem. It’s fully compatible with desktop simulators, and allows switching from desktop to cloud and vice versa at anytime without losing features in the simulations.
 The Construct was an official tool at the 2015 IEEE-RAS Summer School on Experimental Methodology, Performance Evaluation and Benchmarking in Robotics, and it’s developers are currently working with the University of Pisa and the Center Piaggio to build an off-the-shelf grasping simulation system using a soft robotic hand.
The Construct was an official tool at the 2015 IEEE-RAS Summer School on Experimental Methodology, Performance Evaluation and Benchmarking in Robotics, and it’s developers are currently working with the University of Pisa and the Center Piaggio to build an off-the-shelf grasping simulation system using a soft robotic hand.
Recently, the company participated in the Robot Launch 2015 startup competition, winning the Reader’s pick award and the Siemens Industrial Award. This later award makes The Construct a Frontier Partner of Siemens.
You can see a demo about how to launch your already created simulations in The Construct by visiting this post.
You can also enrol in The Construct for a free account and start running your simulations in the cloud. Just visit us here.
tags: c-Research-Innovation, Simulation

AUAI is supported by:









