
Robohub.org
The one-wheel Cubli

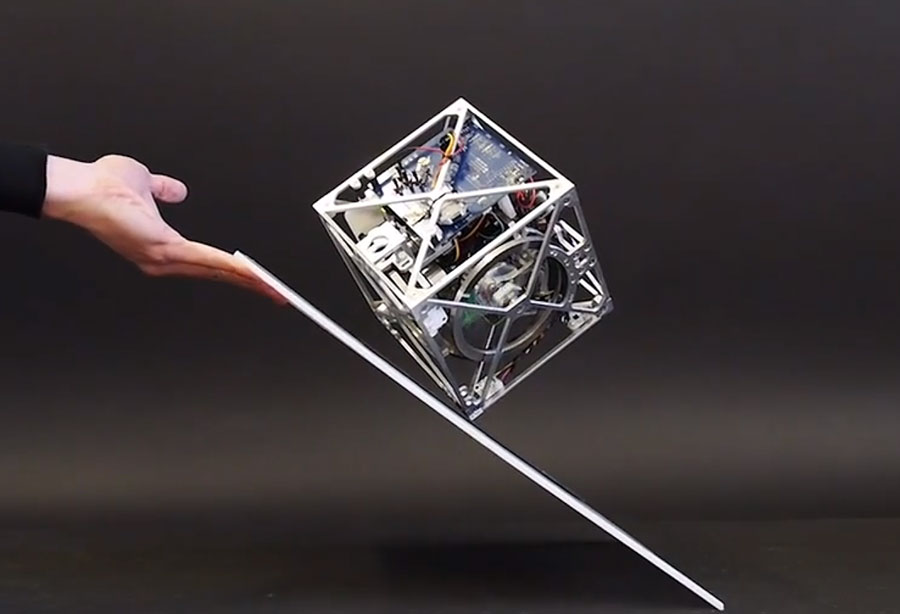
Researchers Matthias Hofer, Michael Muehlebach and Raffaello D’Andrea have developed the one-wheel Cubli, a three-dimensional pendulum system that can balance on its pivot using a single reaction wheel. How is it possible to stabilize the two tilt angles of the system with only a single reaction wheel?
The key is to design the system such that the inertia in one direction is higher than in the other direction by attaching two masses far away from the center. As a consequence, the system moves faster in the direction with the lower inertia and slower in the direction with the higher inertia. The controller can leverage this property and stabilize both directions simultaneously.
This work was carried out at the Institute for Dynamic Systems and Control, ETH Zurich, Switzerland.
Almost a decade has passed since the first Cubli
The Cubli robot started with a simple idea: Can we build a 15cm sided cube that can jump up, balance on its corner, and walk across our desk using off-the-shelf motors, batteries, and electronic components? The educational article Cubli – A cube that can jump up, balance, and walk across your desk shows all the design principles and prototypes that led to the development of the robot.
Cubli, from ETH Zurich.
tags: c-Research-Innovation

AUAI is supported by:









