
Robohub.org
The Year of CoCoRo Video #34/52: Relay chain basics
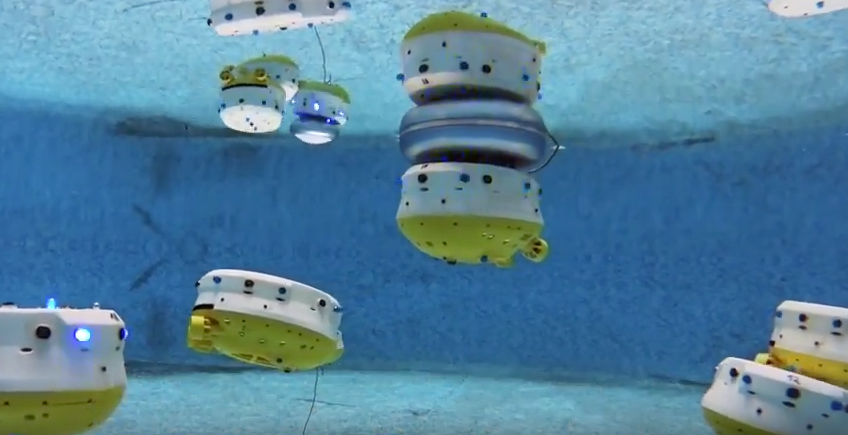
The EU-funded Collective Cognitive Robotics (CoCoRo) project has built a swarm of 41 autonomous underwater vehicles (AVs) that show collective cognition. Throughout 2015 – The Year of CoCoRo – we’ll be uploading a new weekly video detailing the latest stage in its development. This video shows a series of experiments we performed on the relay chain, a chain of Lily robots that connects two spatially separated points in the underwater habitat.
In the first set of experiments these two end points are fixed, while in the second set they are moving, thus the relay chain formed by the robot swarm has to reconfigure and reshape. The robots in the chain perform an algorithm inspired by the shoaling behavior of fish. Using their photoreceptors (photodiodes), they look out for the blue-light blinks of neighboring robots and estimate distance and angle from the light intensity. This helps them decide which direction to follow. The algorithm can also function “communication free,” using, instead, an onboard camera, with image processing replacing the sensing activity and no need for signals from neighboring AUVs. Operating with passive sensing is important for the scalability of the method.
tags: AUV, c-Research-Innovation, CoCoRo, EU, Swarming, UAV, underwater video

AUAI is supported by:









