
Robohub.org
The car in your driveway may be more autonomous than you think

Did you know that the majority of the cars we buy and drive today are able to act by themselves and maneuver themselves out of an accident? They can also beat the best human drivers in breaking accuracy and manage even the most finicky engines. Our cars may not yet be fully autonomous but they’re much closer to driving themselves than we realize.
From a pioneering mode of transport to an everyday necessity (or necessary evil) for commuters the world over, the car has come a long, long way since its inception. In its early days, the act of driving required significant expertise; now it is considered almost a right, directly linked with a person’s mobility or even personal freedom. The trend towards automation covers all aspects of a car’s operation and systems, including driving aids such as climate control and smart lighting, as well as control of the actual movement of the vehicle. This article gives an overview of the milestones along the road to autonomy, focusing especially on the systems and devices that directly control the behaviour of the car: the engine and transmission, the steering and the breaks, and the various sensors and processors that provide and manage the data.

Drivers of the first passenger cars were fully occupied with engine management, and had to control the ignition timing and the air-fuel mix, and perform a highly synchronized ballet of movements just to change gear. Gradually, however, the engine and transmission of our cars became more and more self-sufficient. Manual ignition control gave way to mechanical and then to electronic control. Sensitive carburetors were replaced by self-controlled electronic fuel injection systems, while manual transmissions evolved and became much easier to use. Early on, automatic transmission systems were available to the public where the economy and the market allowed. Nowadays efficient multi-gear automatic transmissions are exceedingly popular and are rapidly replacing manual gearboxes. And of course there is a substantial and growing percentage of electric cars, which can be operated almost as easily as a child’s toy.
The important thing is that, in many commercially available cars today, the input from the driver towards the engine and transmission passes through potentiometers and actuators, with no mechanical link. A computer filters the input from the driver and manages the engine and transmission accordingly.
Data input for the engine management is provided by the engine monitoring sensors, but also from the ESP/ABS (more on that below) and even from the navigation system. By using GPS and cellphone coverage, a car may predict its route and act accordingly, for example changing gear before a steep slope, or having the break pressure stand by in maximum pressure before a bend.
Steering has been more resistant to technological advances; the steering in a car today isn’t very different in principle than that of a 1910 Ford Model T. The most significant improvement was the addition of hydraulic, and later, electric (or electro-hydraulic) assistance. The driver has always a direct link with the steering wheels and, apart from active steering systems (mentioned below), few advances have been made in this area.
It probably isn’t a coincidence that brakes, arguably the most sensitive area from a safety point of view, are by far the most automated system of an everyday car, and where people are less reluctant to have their actions moderated by computers. While, as mentioned above, loss of direct mechanical linkage is relatively new to throttle (usually this loss is found only in research vehicles for steering), brakes lost their mechanical linkage almost a century ago. Their hydraulic system (used in practically all passenger cars) not only augments the force of the driver but, aided by a system of valves, distributes the breaking force in order to compensate for weight transfer.

The biggest breakthrough though was the introduction of anti-lock breaking system (ABS) first introduced in the 60s. It was designed to prevent the wheels from locking up while the vehicle was moving. Its operation is relatively simple: speed sensors on each wheel detect lock and electronically controlled valves reduce breaking force on the each wheel, thus keeping it within the desired slip percentage (~20% or less). Although a very good driver could use threshold breaking in order to maintain traction, ABS is a milestone because it can perform better than any human by monitoring and controlling the breaking force on each specific wheel. One would have to have four fast, super-human feet and four break pedals (along with the necessary brain capacity) to perform as well as an ABS system, which is found in almost any car on the market today, even the cheapest ones.
![BMW-8er-20[2]](http://robohub.org/wp-content/uploads/2014/06/BMW-8er-202-1024x682.jpg)
An even bigger breakthrough that quietly saved many lives and averted numerous accidents is what’s known as electronic stability program, or ESP. It’s an evolution of ABS and uses wheel speed sensors, a steering wheel position sensor, a simple (by robotic standards) yaw sensor and algorithms to govern the ABS valve unit. Judging from each wheel speed, the steering angle and the yaw of the car, the ESP monitors the car’s trajectory (as dictated by the amount the driver turns the steering wheel). If it detects any deviations, it breaks individual wheels in order to pivot the car towards the desired direction. It can also take into account the throttle travel and reduce the power of the car if necessary.
The result is a system that monitors the driver’s input and acts directly through the breaks (and throttle) to retain control of the car. By detecting skids at their earliest stages, and acting quickly on individual wheels and the engine, it can prevent accidents more effectively than any human could.
(You can also check this older video of TV show’s Fifth Gear that demonstrates the abilities of ESP.)
Some new systems also employ steering to assist the driver in controlling the car, such as actively controlled rear-wheel steering – a system occasionally used in specific high performance cars for more than two decades, or as it is the case more recently, by acting directly on the main steering system of the front wheels. By adding a corrective input, ESP can use steering to introduce small corrections along with any breaking action.
Active steering is not yet very wide-spread, although rear wheel steering under computer control is quite old (Honda, Nissan, BMW and Mitsubishi were selling cars with active 4WS decades ago, Porsche and Renault still are today). Active front wheel steering is newer but still rare. It’s worth mentioning that it always acts as an additional input and the driver maintains a direct mechanical linkage to the steering. The ESP control mechanism adds an additional or counterweight force (usually through a planetary gear, in parallel with the steering column) that translates to a slightly corrected slip angle.

A different approach with similar (thought not identical) results is to employ active differentials. A system with clutches and/or auxiliary gearboxes inside the transmission and differentials can actively manage how much power is delivered on each wheel, thus providing the necessary yaw moment to influence the attitude of the car. The effect is similar to active rear wheel steering, providing yaw moment without slowing the car (like individual wheel breaking does). This is why, like RWS, active differentials are mostly used on performance cars.
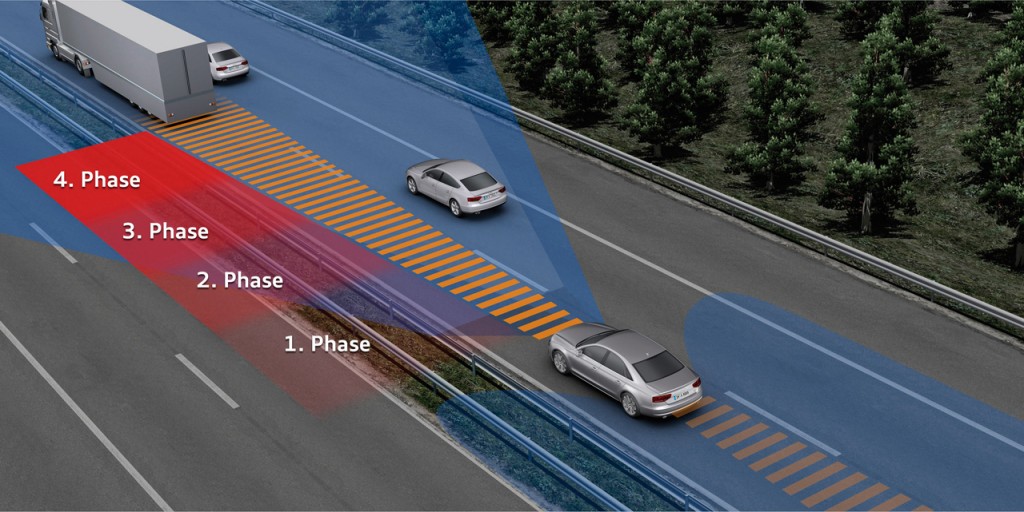
Another area of gradual automation is adaptive cruise control systems. This is an enhanced version of the regular cruise control systems that are very popular in the US (although not so much in Europe). Cruise control maintains a certain speed until the driver hits the breaks. Additionally, adaptive cruise control can automatically reduce speed when the car is approaching a vehicle in front of it and restate the desired speed when conditions allow.
The system usually includes a radar sensor placed in the front bumper and the same technology is also applied in collision avoidance systems even without the cruise control function. By detecting obstacles in front of it, the car can notify the driver or even take action and break by itself. Nowadays even very small and inexpensive cars can be equipped with it, and its performance is more than adequate. A similar function is the lane departure warning, where sensors (usually placed under the rear-view mirrors) scan the road and detect from the white lines if the vehicle is going off course.
Finally the most impressive task a commercial passenger car can do today is without doubt park by itself. Already on sale, park-assist can scan the surroundings and perform the necessary maneuvers in order to park, as long there is sufficient space. Probably a luxury and not really necessary given that it operates where even a mediocre driver can easily park, it’s is the most visible picture of a self-driven car available on the market.
A very important point is that all the systems described above could co-operate with each other and maximize their influence. Although in general they’re used independently it is inevitable that they’ll be integrated into a complete set. Steps towards this direction have already been made but there is a lot of room for improvement.
How close are today’s cars to complete automation?
Engine-wise, many cars today (and certainly more in the future) have no mechanical link between the throttle pedal and the engine. Power delivery is under fully electronic control, so from the perspective of the engine, everything is primed for a fully autonomous car.
Likewise for the powertrain and transmission. Automatic gearboxes are ever more popular and already they require no human input. Of course things are even easier for electric cars.
Breaks are also already highly automated, but they usually rely on the force one is exerting on the pedal. However by-wire breaks have already been used in passenger cars (Mercedes W211 & R230) even with an analog hydraulic backup for safety (or legislative reasons).
The steering system, although it will probably be the last to come fully under computer control, is already getting there with active steering systems currently on sale. The step from an assistive active steering system to a full authority one is very small (at least technically).
The data input and processing necessary for an autonomous car is technically the most difficult part by far. What we described above is automation that builds on human input: even the most capable commercial cars today rely on their drivers to tell them where to go, how fast and what to avoid. A new set of sensors along with the necessary onboard computational power should eventually substitute for the driver, but this is already happening both partially (as we examined in this post) and fully, as in Google’s new purpose-built self-driving car.
Though functional fully autonomous cars exist and perform well even today, the last obstacle they have to overcome in order to reach the market is the product liability and the legal complications of having a car acting on its own.
Glossary:
ABS: anti-lock breaking system (or Antiblockiersystem in German)
ESP: Electronic Stability Program (or Elektronisches Stabilitätsprogramm in German), also found in other acronyms, ESC (Electronic Stability Control ), VSA (vehicle stability augmentation) etc.
RWS: rear wheel steering
VGS: variable gear ratio steering
If you liked this article, you may also be interested in:
- How do self-driving cars work?
- Pure autonomy: Google’s new purpose-built self driving car
- SAE defines six levels of driving automation
- Human error as a cause of vehicle crashes
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: analysis, Automotive, Autonomous Cars, robohub focus on autonomous driving, Robot Car, self-driving cars

AUAI is supported by:









