
Robohub.org
The relationship between dance and robotic fabrication – with video

UCL’s Interactive Architecture Lab has developed a new type of choreography – one that explores the potential for dialogue between humans and robots – and the way we might design cooperatively in the future. Fabricating Performance is the brainchild of Syuko Kato and Vincent Huyghe, bringing together their specialisms of dance and robotic systems.
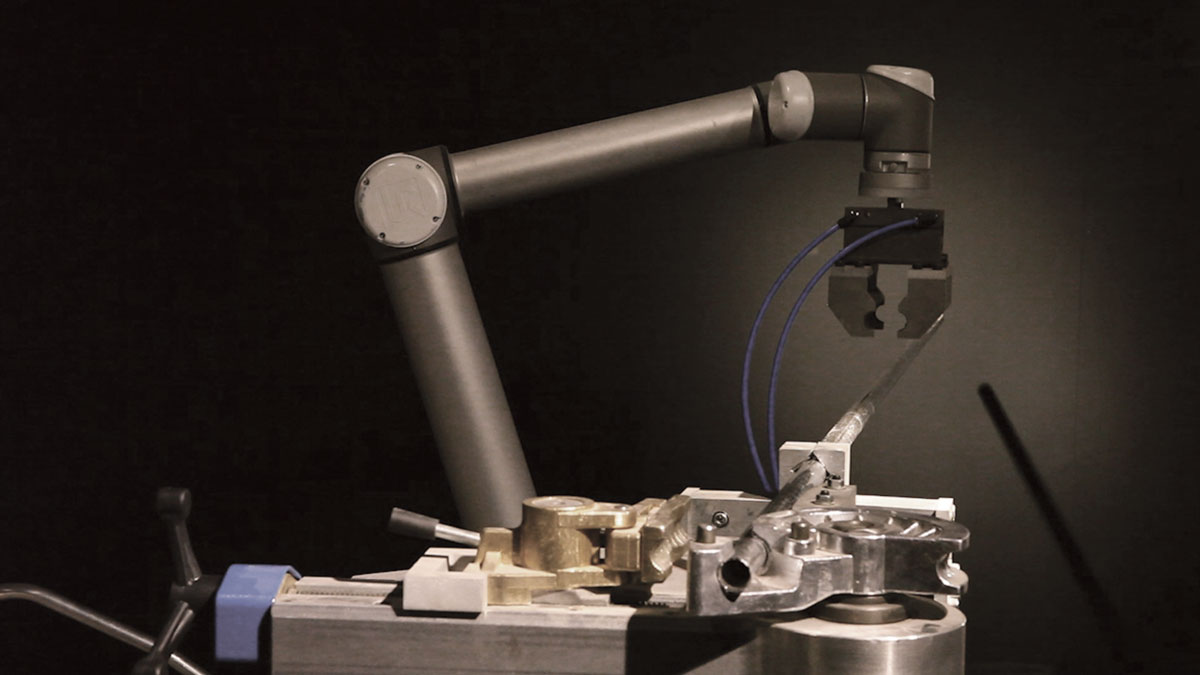
Inspired by existing notational languages in dance, Fabricating Performance evolves what have traditionally been graphic, symbolic systems and proposes a new way of interpreting and representing movement, through the generation of architectural-scale sculptures. We have designed a live custom-fabrication system, which combines methods of designing dance and architecture – and turns robots into creative collaborators. Body movement is tracked, analysed and translated into tool paths for fabrication by a robotic armature and an industrial CNC pipe bending machine. Discrete construction elements are fabricated in response to the dancer/designers performance.

Source: Syuko Kato, UCL Interactive Architecture Lab

Source: Syuko Kato, UCL Interactive Architecture Lab
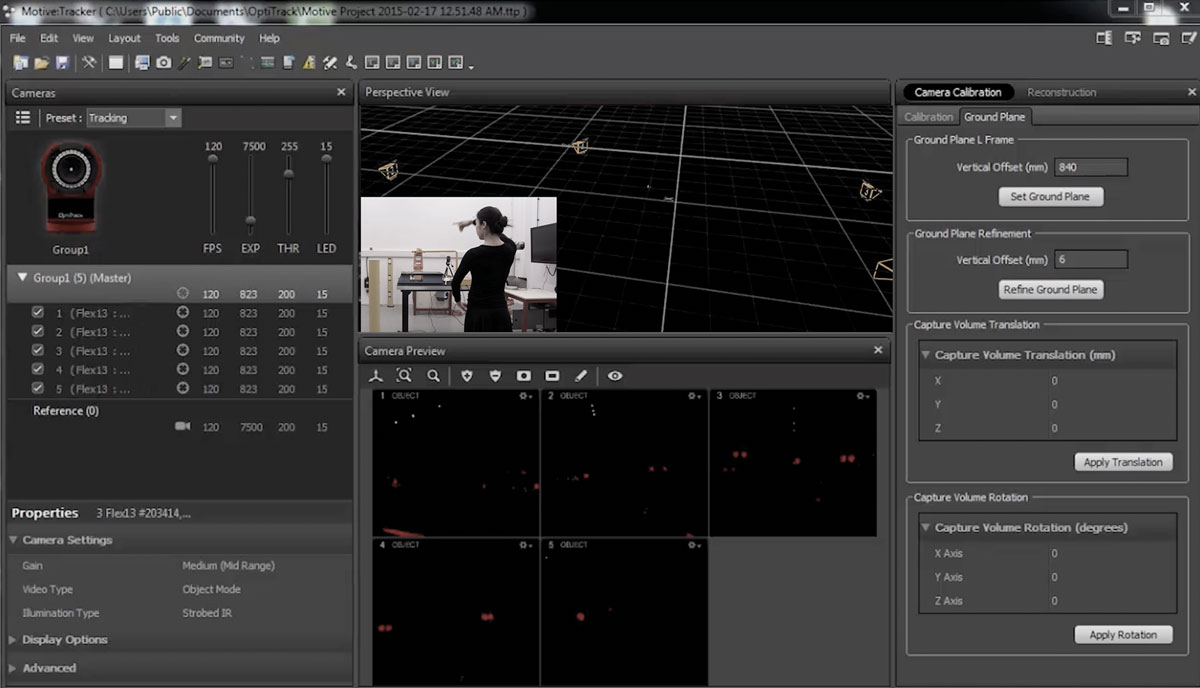
Through the system, a dancer’s gestures are captured as motion data and interpreted into manufacturing protocols. These protocols become instructions that guide the fabrication of physical representations of the dance, which then exist within a shared arena. Repeating this process creates a continuous and constantly changing the conversation between human and robot, turning both into equally influential participants in a unique, interactive and iterative performance.

Source: Syuko Kato, UCL Interactive Architecture Lab
Source: Syuko Kato, UCL Interactive Architecture Lab
Source: Syuko Kato, UCL Interactive Architecture Lab
Read our paper for the Architecture In Play Conference July 2016.
Key references
Binkley, T. (1993), Refiguring Culture, Future Visions: New Technologies of the Screen, London: British Film Institute Publications, pp. 90-122.
Elsewit, K. (2008), The Some of the Parts: Prosthesis and Function in Bertolt Brecht, Oskar Schlemmer, and Kurt Jooss, Modern Drama
Gage, S. (2007), Constructing the User, John Wiley & Sons, Ltd., Wiley InterScience, pp.313-322
Gehm, S., Husemann, P., & von Wilcke, K. (Eds.). (2007), Knowledge in Motion: Perspectives of Artistic and Scientific Research in Dance. transcript Verlag.
Goldberg, R. (2012), tonight: The Languages of Dance, Performance: The Art of Notation [Online] Available from: http://performa-arts.org [Accessed: 30rd December 2014]
Goulthorpe, M., et al. (2001), ‘Aegis Hyposurface: The Bordering of University and Practice’, Work-in-Progress, Part1, ACADIA, p.p. 344-349
Groves, R, M. (2012), William Forsythe and Practice of Choreography: It starts from Any Point (review), Dance Research Journal, 44:2, winter2012, pp.117-121
Kamvasinou, K. (2010), Notation timelines and the aesthetics of disappearance, The Journal of Architecture, 15:4, pp.397-423, DOI: 10.1080/13602365.2010.507517
Kolarevic, B. & Malkawi, A. (2008), Performative Architecture: Beyond Instrumentality, Available at: http://doi.wiley.com/10.1111/j.1531-314X.2006.00068_1.x.
Merleau-Ponty, M. (1964), The primacy of perception: and other essays on phenomenological psychology, the philosophy of art, history, and politics. Northwestern University Press.
Negroponte, N. (1970), The Architecture Machine: Toward a More Human Environment, Cambridge: MIT Press
Rentschler,Ingo et al. (1988), Dance, the fugitive form of art. Aesthetics as Behaviour, Beauty and the Brain, Birkhäuser, Basel Boston Berlin
Salter, C. (2010), Entangled: technology and the transformation of performance. MIT Press.
Schwabe, C. (2010), Eureka and Serendipity : The Rudolf von Laban Icosahedron and Buckminster Fuller ’ s Jitterbug.Bridges, pp.271–278.
Sparacino, F., Wren, C., Davenport, G., & Pentland, A. (1999). Augmented performance in dance and theater. International Dance and Technology, 99, 25-28.
Sparacino, F. (2002), Narrative Spaces: bridging architecture and entertainment via interactive technology. In 6th International Conference on Generative Art, Milan, Italy.
Sparacino, F. (2008), Natural Interaction in Intelligent Spaces: Designing for Architecture and Entertainment, Multimedia Tools and Applications Journal, Springer
Spurr, S. (2007), Chance encounters between body and Buildings : New technologies in architecture and dance.
Thomsen, M.R. (2004), Discovering Mixed Reality, University College London
Tschumi, B. (1996), Architecture and Disjunction. The MIT Press
Waterhouse, E. et al. (2014), Doing Duo – a case study of entrainment in William Forsythe’s choreography “Duo”, Frontiers in Human Neuroscience, October 21, DOI: 8:812, 10.3389/fnhum.2014.00812
Weinstein, B. (2008). Flamand and His Architectural Entourage, Journal of Architectural Education, 61:4, pp.25-33, DOI: 10.1111/j.1531-314X.2008.00184.x
Weinstein, B. (2013), Performing Architectures: Closed and open logics of mutable scenes, Performing Research: A Journal of the Performing arts, 18:3, pp.161-168, DOI: 10.1080/13528165.2013.818328
Source of Figure
Positive space image: Gjon, Mili. (1947), Ballet Essay Stroboscopic image of ballerina Nora Kaye doing a pas de bourree. [Online] Available from: http://time.com/photography/life/ (Accessed: 12 June 2015).
tags: c-Arts-Entertainment

AUAI is supported by:









