
Robohub.org
A drone with insect-inspired folding wings
 When designing robots to help in the search for victims after a natural disaster, a number of features are important: robustness, long battery life and ease of transport. With this latest constraint in mind, a team from Floreano Lab, EPFL and NCCR Robotics will present their new drone with insect-inspired folding wings at IROS 2016.
When designing robots to help in the search for victims after a natural disaster, a number of features are important: robustness, long battery life and ease of transport. With this latest constraint in mind, a team from Floreano Lab, EPFL and NCCR Robotics will present their new drone with insect-inspired folding wings at IROS 2016.
What makes these wings different to previous solutions is the origami techniques used to produce it, creating the perfect folding structure. First, the research team looked for examples from nature which exhibit folding patterns with a high size reduction and one degree of freedom to fold the wing with single and intuitive movement in a short amount of time. Coleopterans (beetles) were found to not only have the perfect wings, but also control wing deployment from the base of the wing, making them easier to artificially replicate.
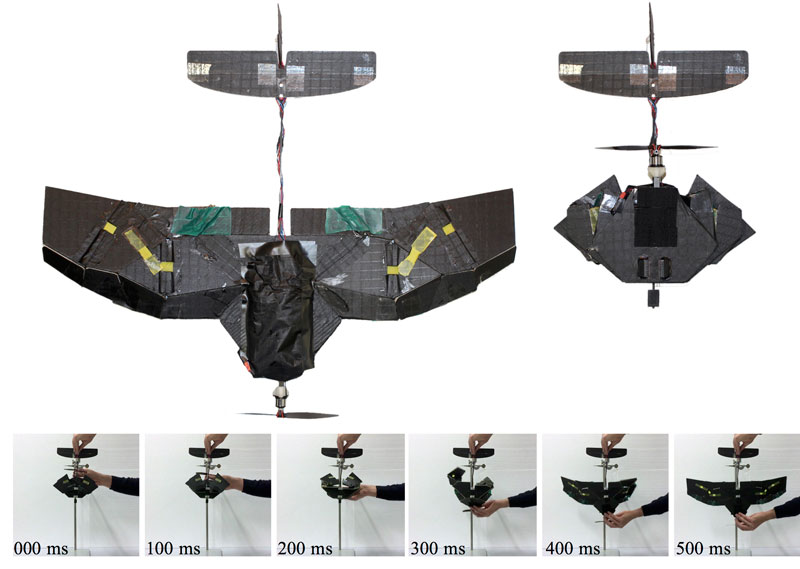
Through prototyping and modelling, the original coleopteran blueprints were adapted and updated. The artificial crease pattern achieves a significant size reduction. In the stowed configuration the wingspan is 43% and the surface is 26% of the respective dimensions in the deployed configuration. Despite the complexity of the patterns, the wing has a single degree of freedom and can be folded using only one simple movement.
Finding the crease pattern was only one of the issues that the research team hoped to solve. When using paper for origami, the thickness is negligible, however, when creating a wing, a thicker material must be employed in order to sustain the stresses created during flight. The thicker material is accounted for by creating a 3D folding pattern with tiles of different thickness. The addition of compliant and bistable folds made of pre-stretched latex ensures maximum durability and a smooth deployment.
The presented wings are 26g in weight, with dimensions of 115 x 215 x 40 mm when folded and 200 x 500 x 16 mm when deployed, giving 160 cm2 surface area and 989 cm3 volume when folded and 620 cm2 surface area and 1600 cm3 when deployed. The resulting drone has been tested against a comparable rigid wing in a wind-tunnel, and showed only marginally less good performance when considering lift/drag values.
The ability to create a lightweight, durable drone that is capable of being easily transported and quickly deployed moves us not only closer to commonplace use of robots in locating victims after natural disasters, but also in land and space exploration, aeronautics and civil inspections.
Reference:
Dufour, Louis; Owen, Kevin; Mintchev, Stefano; Floreano, Dario, A Drone with Insect-Inspired Folding Wings, 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS, Daejeon, Korea, October 9-14, 2016
tags: c-Aerial, Drone, NCCR Robotics

AUAI is supported by:









