
Robohub.org
Bioinspired robotics #1: Swarm collectives, with Radhika Nagpal
Source: Wyss Institute at Harvard University
In the Disruptive Podcast series, Terrence McNally speaks directly with Wyss Institute researchers, exploring what motivates them and how they envision our future as might be impacted by their disruptive technologies. In part 1 of the Disruptive: Bioinspired Robotics podcast episode, Wyss Founding Core Faculty Member Radhika Nagpal discusses swarm collectives, as well as the challenges faced by women in the engineering and computer science fields.
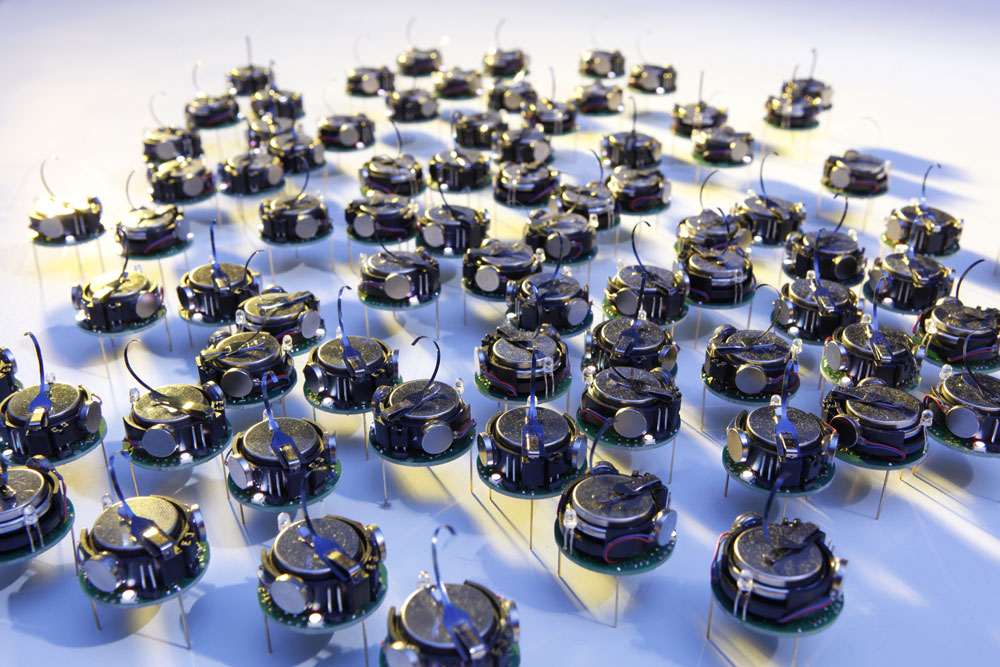
Nagpal is developing programming paradigms that enable new types of robotic systems to mimic the collective behaviors of living creatures. Inspired by bee swarms and termite colonies, she is applying nature’s approach to decentralized cooperation to engineer new collective systems that meet real-world challenges. Biological systems, from embryos to social insects, depend upon the coordinated behavior of large numbers of individual agents to achieve highly complex outcomes — termites build skyscrapers and embryonic cells develop into healthy babies. Nagpal is building new types of distributed systems — from multi-modular robots and robot swarms, to vast sensor networks — that have similar capabilities.
If you liked this article, you may also be interested in:
- Thousand-robot swarm self-assembles into arbitrary shapes
- 25 women in robotics you need to know about – 2015
- #153: Robots Podcast: Termite-Inspired Construction
- Crowdsourcing new strategies for cancer treatment: Towards swarming nanobots
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: bioinspired, c-Research-Innovation, Disruptive Podcast, podcast, swarm robotics, Swarming, Wyss Institute
AUAI is supported by:









