
Robohub.org
How to reduce Zika using flying robots
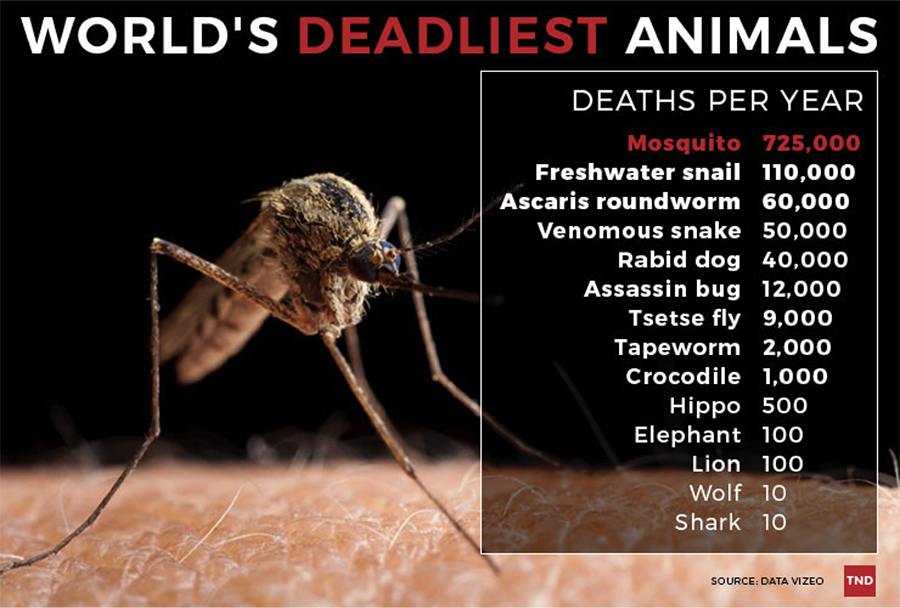 Mosquitos kill more humans every year than any other animal on the planet and conventional methods to reduce mosquito-borne illnesses haven’t worked as well as many hoped. So we’ve been hard at work since receiving this USAID grant six months ago to reduce Zika incidence and related threats to public health.
Mosquitos kill more humans every year than any other animal on the planet and conventional methods to reduce mosquito-borne illnesses haven’t worked as well as many hoped. So we’ve been hard at work since receiving this USAID grant six months ago to reduce Zika incidence and related threats to public health.
Our partners at the joint FAO/IAEA Insect Pest Control Lab in Vienna, Austria have been working to perfect the Sterile Insect Technique (SIT) in order to sterilize and release male mosquitos in Zika hotspots. Releasing millions of said male mosquitos increases competition for female mosquitos, making it more difficult for non-sterilized males to find a mate.
We learned last year at a USAID Co-Ideation Workshop that this technique can reduce the overall mosquito population in a given area by 90%. The way this works is by releasing millions of sterilized mosquitos using cars, helicopters and/or planes, or even backpacks.
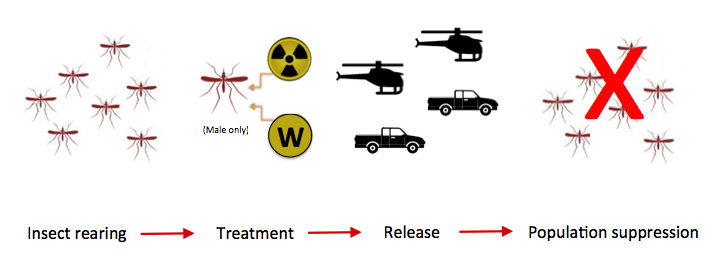 Our approach seeks to complement and extend (not replace) these existing delivery methods. The challenge with manned aircraft is that they are expensive to operate and maintain. They may also not be able to target areas with great accuracy given the altitudes they have to fly at.
Our approach seeks to complement and extend (not replace) these existing delivery methods. The challenge with manned aircraft is that they are expensive to operate and maintain. They may also not be able to target areas with great accuracy given the altitudes they have to fly at.
 Cars are less expensive, but they rely on ground infrastructure. This can be a challenge in some corners of the world when roads become unusable due to rainy seasons or natural disasters. What’s more, not everyone lives on or even close to a road.
Cars are less expensive, but they rely on ground infrastructure. This can be a challenge in some corners of the world when roads become unusable due to rainy seasons or natural disasters. What’s more, not everyone lives on or even close to a road.
 Our IAEA colleagues thus envision establishing small mosquito breeding labs in strategic regions in order to release sterilized male mosquitos and reduce the overall mosquito population in select hotspots. The idea would be to use both ground and aerial release methods with cars and flying robots.
Our IAEA colleagues thus envision establishing small mosquito breeding labs in strategic regions in order to release sterilized male mosquitos and reduce the overall mosquito population in select hotspots. The idea would be to use both ground and aerial release methods with cars and flying robots.
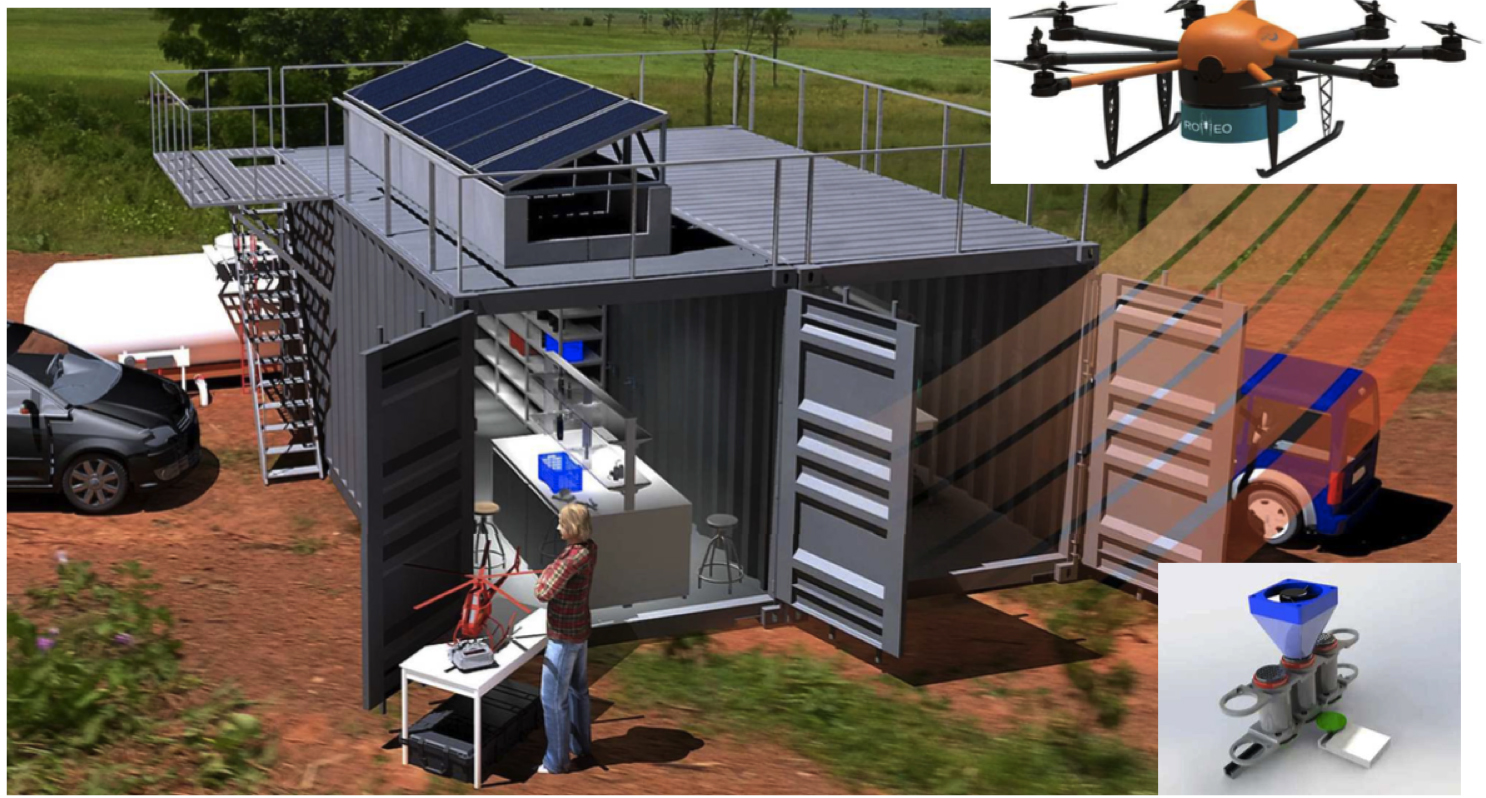 The real technical challenge here, besides breeding millions of sterilized mosquitos, is actually not the flying robot (drone/UAV) but rather the engineering that needs to go into developing a release mechanism that attaches to the flying robot. In fact, we’re more interested in developing a release mechanism that will work with any number of flying robots, rather than having a mechanism work with one and only one drone/UAV. Aerial robotics is evolving quickly and it is inevitable that drones/UAVs available in 6-12 months will have greater range and payload capacity than today. So we don’t want to lock our release mechanism into a platform that may be obsolete by the end of the year. So for now we’re just using a DJI Matrice M600 Pro so we can focus on engineering the release mechanism.
The real technical challenge here, besides breeding millions of sterilized mosquitos, is actually not the flying robot (drone/UAV) but rather the engineering that needs to go into developing a release mechanism that attaches to the flying robot. In fact, we’re more interested in developing a release mechanism that will work with any number of flying robots, rather than having a mechanism work with one and only one drone/UAV. Aerial robotics is evolving quickly and it is inevitable that drones/UAVs available in 6-12 months will have greater range and payload capacity than today. So we don’t want to lock our release mechanism into a platform that may be obsolete by the end of the year. So for now we’re just using a DJI Matrice M600 Pro so we can focus on engineering the release mechanism.
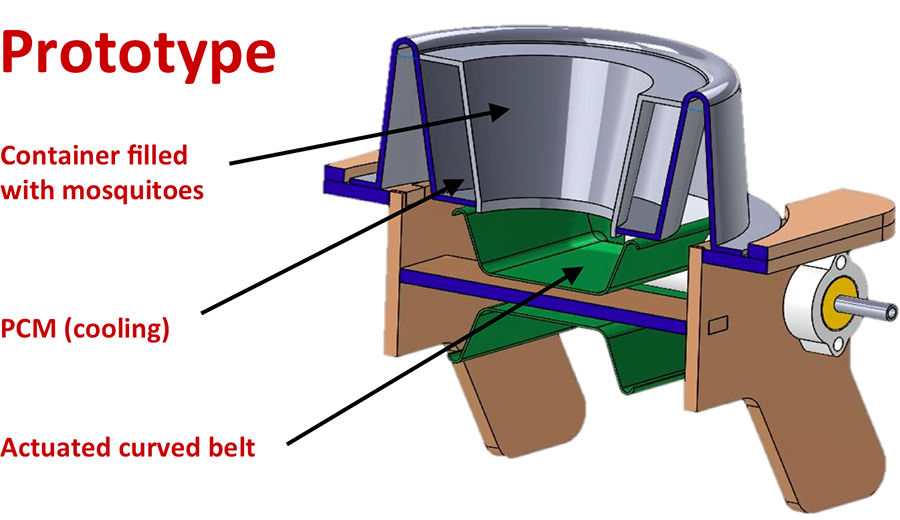 Developing this release mechanism is anything but trivial. Ironically, mosquitos are particularly fragile. So if they get damaged while being released, game over. What’s more, in order to pack one million mosquitos (about 2.5kg in weight) into a particularly confined space, they need to be chilled or else they’ll get into a brawl and damage each other, i.e., game over. (Recall the last time you were stuck in the middle seat in Economy class on a transcontinental flight). This means that the release mechanism has to include a reliable cooling system. But wait, there’s more. We also need to control the rate of release, i.e., to control how many thousands of mosquitos are released per unit of space and time in order to drop said mosquitos in a targeted and homogenous manner. Adding to the challenge is the fact that mosquitos need time to unfreeze during free fall so they can fly away and do their thing, i.e., before they hit the ground or else, game over.
Developing this release mechanism is anything but trivial. Ironically, mosquitos are particularly fragile. So if they get damaged while being released, game over. What’s more, in order to pack one million mosquitos (about 2.5kg in weight) into a particularly confined space, they need to be chilled or else they’ll get into a brawl and damage each other, i.e., game over. (Recall the last time you were stuck in the middle seat in Economy class on a transcontinental flight). This means that the release mechanism has to include a reliable cooling system. But wait, there’s more. We also need to control the rate of release, i.e., to control how many thousands of mosquitos are released per unit of space and time in order to drop said mosquitos in a targeted and homogenous manner. Adding to the challenge is the fact that mosquitos need time to unfreeze during free fall so they can fly away and do their thing, i.e., before they hit the ground or else, game over.
 We’ve already started testing our early prototype using “mosquito substitutes” like cumin and anise as the latter came recommended by mosquito experts. Next month, we’ll be at the FAO/IAEA Pest Control Lab in Vienna to test the release mechanism indoors using dead and live mosquitos. We’ll then have 3 months to develop a second version of the prototype before heading to Latin America to field test the release mechanism with our Peru Flying Labs. One of these tests will involve the the integration of the flying robot and the release mechanism in terms of both hardware and software. In other words, we’ll be testing the integrated system over different types of terrain and weather conditions in Peru specifically.
We’ve already started testing our early prototype using “mosquito substitutes” like cumin and anise as the latter came recommended by mosquito experts. Next month, we’ll be at the FAO/IAEA Pest Control Lab in Vienna to test the release mechanism indoors using dead and live mosquitos. We’ll then have 3 months to develop a second version of the prototype before heading to Latin America to field test the release mechanism with our Peru Flying Labs. One of these tests will involve the the integration of the flying robot and the release mechanism in terms of both hardware and software. In other words, we’ll be testing the integrated system over different types of terrain and weather conditions in Peru specifically.
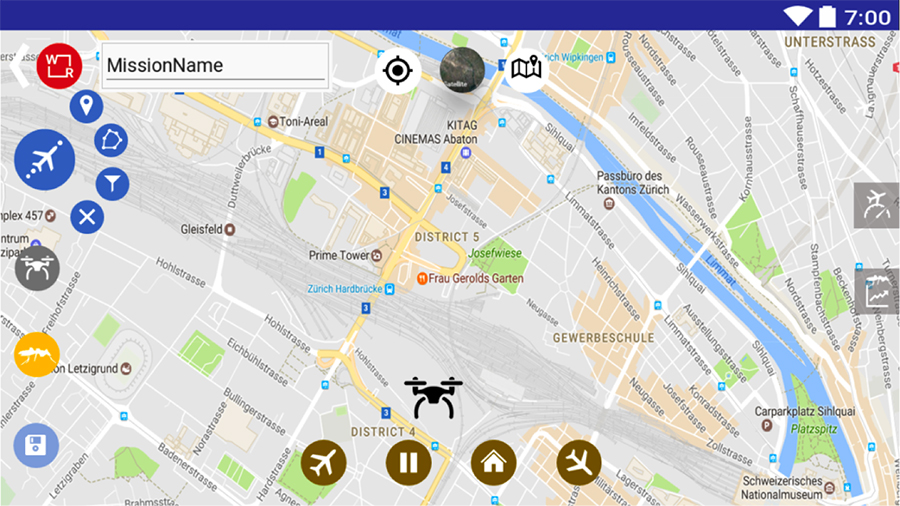
We are already developing the mission control app pictured above to program our autonomous flights. The app will let the operator decide how many sterilized mosquitos to release at any given time and location. Our field tests in Peru will also seek to identify the optimal flight parameters for the targeted and homogenous delivery of sterilized mosquitos. For example, what is the optimal speed and altitude of the flying robot to ensure that the mosquitos are released over the intended areas?
Our Peru Flying Labs has already developed expertise and capacity in cargo drone delivery, most recently in projects in the Amazon Rainforest with the Ministry of Health (more here). This new Zika reduction project –and in particularly the upcoming field tests — will enable us to further build our Peruvian team’s capacity in cargo space. The plan is for Peru Flying Labs to operate the flying robots and release mechanisms as need once we have a more robust version of the release mechanism. The vision here is to have a fleet of flying robots at our Flying Labs equipped with release mechanisms in order to collectively release millions of sterilized mosquitos over relatively large areas. And because our Peruvian colleagues are local, they can rapidly deploy as needed.
 For now, though, our WeRobotics Engineering Team (below) is busy developing the prototype out of our Zurich office. So if you happen to be passing through, definitely let us know, we’d love to show you the latest and give you a demo. We’ll also be reaching out the Technical University of Peru who are members of our Peru Flying Labs to engage with their engineers as we get closer to the field tests in country.
For now, though, our WeRobotics Engineering Team (below) is busy developing the prototype out of our Zurich office. So if you happen to be passing through, definitely let us know, we’d love to show you the latest and give you a demo. We’ll also be reaching out the Technical University of Peru who are members of our Peru Flying Labs to engage with their engineers as we get closer to the field tests in country.
 As an aside, our USAID colleagues recently encouraged us to consider an entirely separate, follow up project totally independently of IAEA whereby we’d be giving rides to Wolbachia treated mosquitos. Wolbachia is the name of bacteria that is used to infect male mosquitos so they can’t reproduce. IAEA does not focus on Wolbachia at all, but other USAID grantees do. Point being, the release mechanism could have multiple applications. For example, instead of releasing mosquitos, the mechanism could scatter seeds. Sound far-fetched? Think again.
As an aside, our USAID colleagues recently encouraged us to consider an entirely separate, follow up project totally independently of IAEA whereby we’d be giving rides to Wolbachia treated mosquitos. Wolbachia is the name of bacteria that is used to infect male mosquitos so they can’t reproduce. IAEA does not focus on Wolbachia at all, but other USAID grantees do. Point being, the release mechanism could have multiple applications. For example, instead of releasing mosquitos, the mechanism could scatter seeds. Sound far-fetched? Think again.
This original blog post can be found on WeRobotics website here.
tags: c-Aerial, cx-Health-Medicine, education, Flying, WeRobotics




