
Robohub.org
Minimally-invasive eye surgery on the horizon as magnetically-guided microbots approach clinical trials

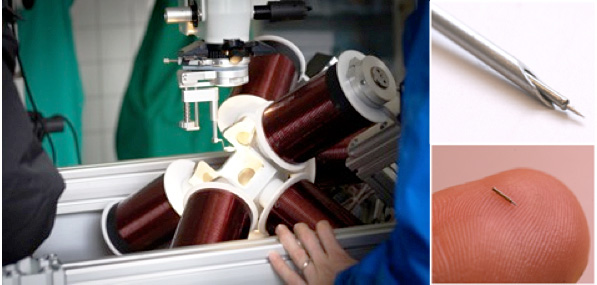
Unlike larger robots, microrobots for applications in the body are too small to carry batteries and motors. To address this challenge, we power and control robots made of magnetic materials using external magnetic fields. Developed at ETH Zurich’s Multi-Scale Robotics Lab (MSRL), the OctoMag is a magnetic manipulation system that uses electromagnetic coils to wirelessly guide microrobots for ophthalmic surgery.
The OctoMag is capable of generating magnetic forces and torques in three dimensions, and is physically restricted to a single hemisphere to allow easy access for patients and physicians. Using an early OctoMag prototype, ex-vivo experiments were performed in pig eyes to study the navigation tasks required for retinal surgery. Following these experiments, a next-generation system was built to accomodate a small animal head, allowing for in-vivo trials. With this system, mobility experiments were conducted in which a microrobot with a diameter of 285 µm (about four times the width of a hair) was navigated reliably through the eye of a rabbit, demonstrating the feasibility of using this technology in surgical applications.
Robots are capable of exploring many environments that are difficult, if not impossible, for humans to reach; the edges of the solar system, the planet Mars, the inner depths of volcanoes, and bottom of the ocean are just some examples. The goal of these robotic explorers is to obtain knowledge about our universe and to answer fundamental questions about the nature of life on Earth. Recently, micro- and nanotechnologies have fueled an exciting expansion of this field by allowing scientists to use robots to probe life at much smaller scales. Nanorobotic systems for exploring the structures of biological cells, and robotic motion planning strategies for the investigation of protein folding, are two compelling examples of the intermarriage between robotics and nanotechnology. Such efforts and others like them illustrate how several areas of science and engineering are rapidly converging to create a new, interdisciplinary approach to research that promises to revolutionize our understanding of the world around us.
While many envision a future in which intelligent nanorobots navigate throughout our bodies searching for and destroying disease, researchers are still far from realizing such advanced technologies. However, progress is being made, and the past decade has seen impressive advances in the fabrication, control, and delivery of power to tiny motile devices.
The MiniMag is a research tool for studies at the micro scale. As a scaled-down version of the OctoMag, the MiniMag can be integrated into an upright or inverted microscope. The eight electromagnetic coils are slightly tilted and can be positioned very close to each other due to their smaller size, and, by reducing the magnetic workspace to one cubic centimetre, much higher forces can now be achieved. Combined with high-resolution optics, the MiniMag system allows for single cell manipulation and studies at the tissue level in 3D.

From the microscale to the nanoscale
As size decreases to the nanoscale, wireless magnetic manipulation becomes increasingly challenging. The magnetic force drops by a power of three as it scales with volume, and fluidic drag forces begin to dominate as inertial forces become negligible. While a number of robotic swimming methods have been proposed to aid mobility at relatively small scales, many of these methods rely on reciprocating motions and do not scale downwards.
More than three billion years ago, bacteria evolved a swimming strategy at micrometer dimensions that nature has had difficulty improving upon, and in 1973, H.C. Berg and R.A. Anderson first described a swimming technique that uses rotating helical flagella. Inspired by this work and the flagellar motion of bacteria such as Escherichia Coli, we have recently developed artificial bacterial flagella (ABF). Our ABF represents the first demonstration of wireless swimming microrobots similar in size and geometry to natural bacterial flagella, and are many orders of magnitude smaller than existing artificial helical swimmers. With the help of 3D-laser-nanolithography, arrays of thousands of such swimmers can now be fabricated. A careful choice of materials allows for cellular interaction, and fluorescent labeling of the device assists with localization and tracking. We are pursuing applications such as the treatment of breast cancer and cerebral infarctions.
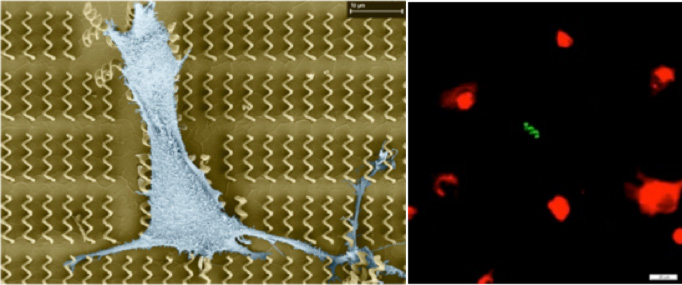
Right: the ABF was coated with a green fluorescent dye called calcein. This dye has about the same molecular weight as various drugs used in chemotherapy and can be used as a model drug. The fluorescence signal helps to detect and track the microswimmer and, when a cell is reached, the diffusion of the dye into the cell can be observed mimicing localized drug delivery.
Source: F. Qiu, L. Zhang, S. Tottori, K. Marquardt, K. Krawczyk, A. Franco-Obregón, B. J. Nelson, “Bio-inspired microrobots”, Materials Today (Elsevier), Vol. 15, October 2012, 463.
The potential impact of this technology on society is high, particularly for biomedical applications, though many challenges remain in developing micro and nanorobots that will be useful to society. An overarching requirement for achieving breakthroughs in this area is the need to bring together expertise from a wide variety of science and engineering disciplines. Robotics brings expertise in the planning and control of mechanisms with many degrees of freedom in uncertain environments. Nanotechnology teaches innovative approaches to fabricating nanoscale machines. In addition, biomedical imaging advances are needed, as is fundamental insight into the nature of fluid dynamics at very small scales. Medical professionals must be tightly integrated into the development cycle, and experts in developing business models and intellectual property must be closely consulted.
About the researchers
Brad Nelson’s Multi-Scale Robotics Lab (MSRL) at the Institute of Robotics and Intelligent Systems, ETH Zurich, Switzerland, is a highly multi-disciplinary research group that leverages advanced robotics techniques to create intelligent machines that operate at micro- and nanometer scales. At the MSRL, a team of nearly 30 scientists pursues a dynamic, robotics-oriented research program involving several emerging areas of science and technology. The technical backgrounds of the scientists in the lab span such diverse fields as materials science, physics, biology, electrical and mechanical engineering, and computer science.
The materials scientists in the lab focus mainly on developing the tools and processes required to fabricate and assemble microscale robots and nanoscale robotic components. Many of these systems are then used in the study of biological environments, including the investigation of molecular structures, cellular systems, and organism behavior. Other members of the MSRL research team are focused on the design and implementation of systems that wirelessly control these microrobots. Potential applications are numerous and diverse, including microrobotically-assisted surgery, magnetic micromanipulation at the cellular level, low Reynolds number locomotion, wireless power delivery, electrostimulation of biological materials, and micro- and nanostructure fabrication and characterization.
The MSRL develops systems for controlling micro- and nanorobots in liquid and pursues various applications for these devices.
[Edited by Hallie Siegel]
If you liked this article, you may also be interested in:
- Crowdsourcing new strategies for cancer treatment: Towards swarming nanobots
- Medical robotic systems market to reach $13.6 billion by 2018
- Robots Podcast: Curved Artificial Compound Eye
- Micro-robotics and medicine: Interview with Toshio Fukuda
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: Brad Nelson, c-Health-Medicine, cx-Research-Innovation, ETH Zurich, Micro, Nano, Prototype, Research, Service Professional Medical Surgery, Swarming, Swiss Robots, Switzerland



