
Robohub.org
Revolutionary implant enables broken spinal cord to function again
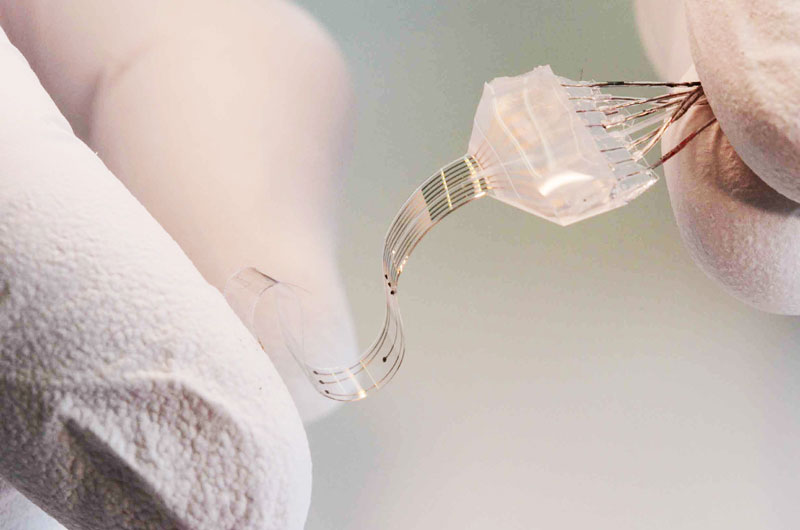
The e-dura is able to function while being bent (photo: © EPFL 2015)
A team from EPFL and NCCR Robotics lead by Profs Stéphanie Lacour, Grégoire Courtine and Silvestro Micera published an article in Science today describing their e-dura implant that could revolutionise how we think about and treat paralysis. Until now, implants placed beneath the dura mater of the spinal cord have caused significant tissue damage when used over long periods. Research shows that the new e-dura implant is viable for months at a time in animal subjects. The team is now moving on to clinical trials in human subjects and is developing their prototype to take to market.
Previous work by the team have enabled animals paralysed by spinal cord injury (SCI) to voluntarily walk again using both chemical and electrical stimulation. While this was a huge advancement in both engineering and biomedicine, there are a number of issues with moving this highly successful laboratory experiment to every day human life, as previous iterations used wire electrodes which were limited to two sites and were difficult to place accurately on the spinal cord. Drug delivery was via an intraperitoneal injection, i.e. an injection into the body cavity. While the results were outstanding, more work needed to be done before this solution could be taken out of a lab situation and into a real world one.
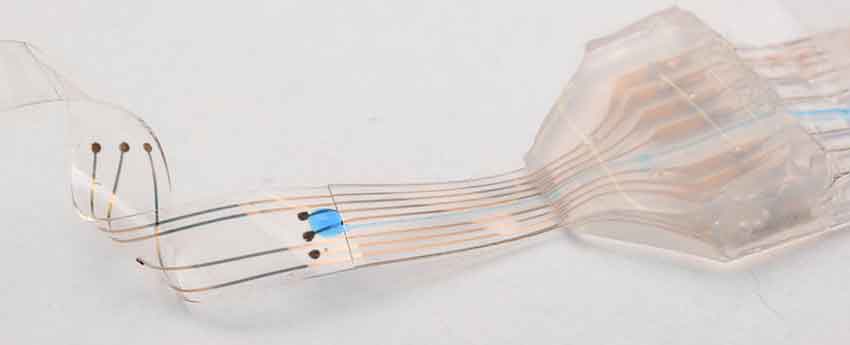
The cracked gold conducting tracks carry impulses, while the fluidic channel provides chemical stimulation (Photo: © EPFL 2015).
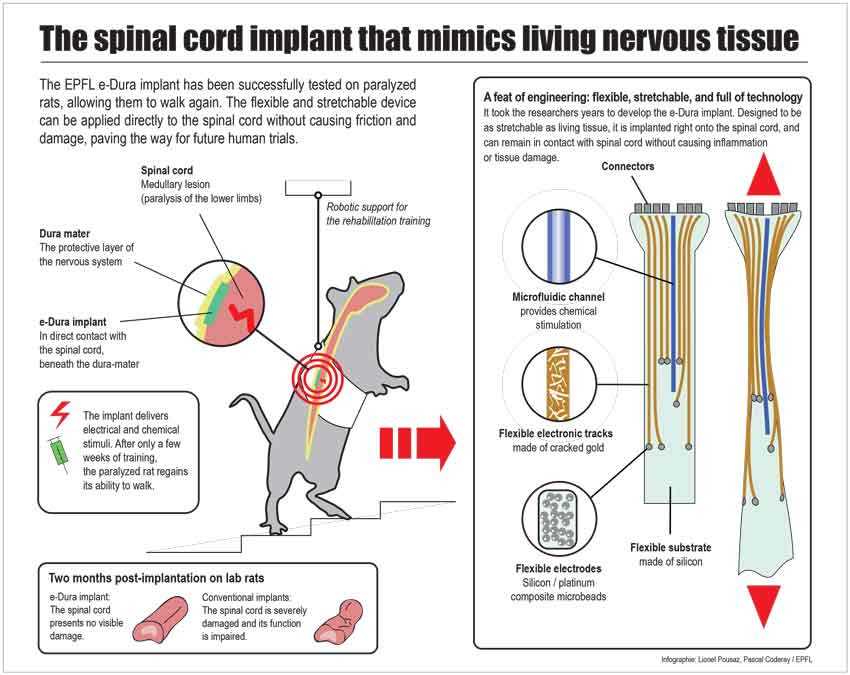
What is presented in the Science paper is a soft and stretchable implant which can be directly placed beneath the dura mater, the nervous system’s protective casing, and onto the spinal cord for months at a time, a length of time which would result in significant tissue damage with all previous surface implants. The e-dura is also designed to carry electrical impulses and chemicals. Under experimental conditions, walking was restored in paralysed rats after implanting followed by two weeks of training using a robotic postural interface also developed as part of NCCR Robotics.
The 200nm thick implant is predominantly made of silicone covered with 35nm thick microcracked gold conducting tracks which can stretch and rebound without damage. The electrodes contained within the implant are made of a unique mix of silicone and platinum microbeads, allowing the implant to function and conduct electricity when moved in any orientation, this combination of the flexible electrodes and conducting tracks mean that electrical impulses can be delivered to the spinal cord. A complimentary fluidic microchannel (100μm x 50μm in cross section) delivers neurotransmitters to reactivate the nerves within the spinal cord. E-dura is implanted over the lumbosacral segments below the site of injury and engages with the “dormant” lumbar locomotor circuits.
The unique implant is able to sit directly on the spinal cord or brain.
The effectiveness of the e-dura is down to its mechanical properties which allow it to be soft and elastic, thus ensuring that it does not rub against the spinal cord causing the issues seen in alternative implants. To create an implant to be so soft and flexible but that is also capable of electrical stimulation and local drug delivery, and this over several weeks in vivo was no small task and involved a team comprising experts in materials science, electronics, neuroscience, medicine and algorithm programming.
Co-author Prof. Grégoire Courtine says of the implant that it’s “ the first neuronal surface implant designed from the start for long-term application ”, and, although it’s only been tested in animals so far, the long term applications and potential implications for the disabled community are clear. As the dura mater also surrounds the brain, it is not just SCI patients who could benefit, but also potentially those with neurological diseases, such as Parkinson’s. The team is now moving on to clinical trials in human subjects and are developing their prototype to take to market.
The Swiss National Center of Competence in Robotics (NCCR Robotics) is a federally funded programme bringing together robotics laboratories from EPFL, ETH Zurich, University of Zurich and University of Lugano to work on wearable, rescue and educational robots.
A full transcript of the paper will be published in print on 09.01.2015 and is available online at sciencemag.org: Minev, I.R., Musienko, P., Hirsch, A., Barraud, Q., Wenger, N., Moraud, E.M., Gandar, J., Campogrosso, M., Milekovic, T., Asboth, L., Torres, R.F., Vachicouras, N., Liu, Q., Pavlova, N., Duis, S., Larmagnac, A., Vörös, J., Micera, S., Suo, Z., Courtine, G. and Lacour, S., “Electric dura mater for long-term multimodal neural interfaces,” Science, Vol. 347 (6218), pp. 159-163, 2015.
If you liked this article, you may also be interested in:
- Lifehand 2 prosthetic grips and senses like a real hand
- Exoskeleton with haptic sensors helps paralysed man to kick off World Cup
- Engineers build brain-controlled music player
- How brain signals could control a variety of devices: BrainGate’s Beata Jarosiewicz
- Robots Podcast: Computer-assisted surgery
- Rehab robots, smart prostheses and exoskeletons to reach $1.8 billion by 2020
- Novel robots for gait and arm rehabilitation: Interview with Robert Riener
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: c-Research-Innovation, cx-Health-Medicine, medical robotics, NCCR, Switzerland

AUAI is supported by:









