
Robohub.org
The Year of CoCoRo Video #49/52: Base stations
During the past year we have shown many swarm algorithms in various experiments. The spotlight was always on the Lily and the Jeff robots. However, there is now another star in the team and this trailer is dedicated to this special agent: the base station!
The base station was finished towards the end of the project, thus, we had to develop (i.e. hack) many surrogates and placeholders for it over the course of the project. We got so experienced with it that we could quickly hack a surrogate base station from almost anything that was lying around in the lab: styrofoam, cans, boxes … whatever was around and handy. This video shows some of those creations.
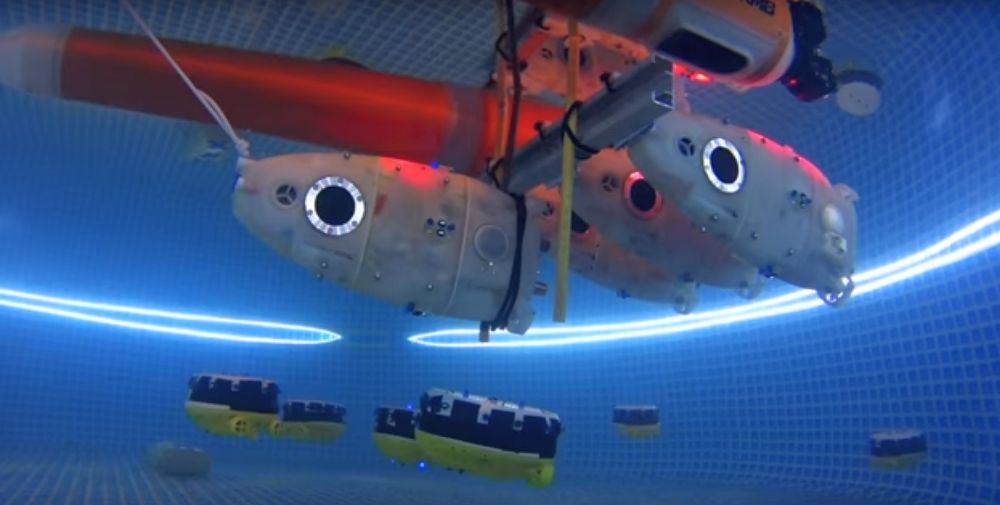
A few months before the final review we had the real thing ready: a typical Italian machine (like Italian cars) made by our partners from SSSA (Pontedera). It was fast as hell, highly manoeuvrable, and elegant. The base station has a docking device and can actively manoeuvre, dock and undock robots and carry three attached spare robots with it. With this central masterpiece, we were ready for our final review.
The EU-funded Collective Cognitive Robotics (CoCoRo) project has built a swarm of 41 autonomous underwater vehicles (AVs) that show collective cognition. Throughout 2015 – The Year of CoCoRo – we’ll be uploading a new weekly video detailing the latest stage in its development.
tags: AUV, c-Research-Innovation, CoCoRo, EU, Swarming, UAV, underwater, video



