
Robohub.org
The Year of the CoCoRo Video #19/52: Electric confinement in the harbour
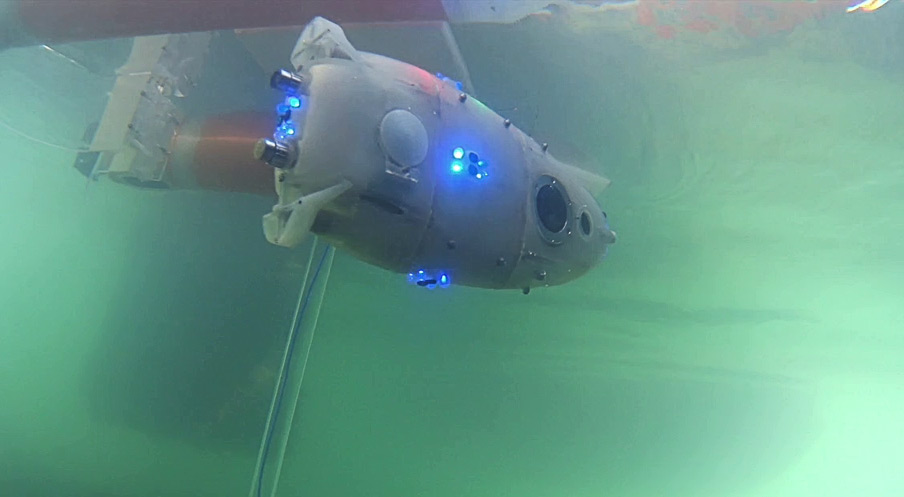
The EU-funded Collective Cognitive Robotics (CoCoRo) project has built a swarm of 41 autonomous underwater vehicles (AUVs) that show collective cognition. Throughout 2015 – The Year of CoCoRo – we will be uploading a new weekly video detailing the latest stage in its development. This video shows how we used an electric underwater field in Livorno harbour to field test confining the robots to a specific area around the base station so that they don’t get lost.
After having tested the electric-field confinement of the Jeff robots to the base station in our pool, we went out to Livorno harbour to test it under out-of-the-lab conditions. Although our CoCoRo prototype robots were not designed to operate in salty ocean water — there is a significantly different electrical conductivity compared to freshwater — the electrical confinement worked there quite well.
To learn more about the project, see this introductory post, or check out all the videos from the Year of CoCoRo on Robohub.
tags: AUV, c-Research-Innovation, CoCoRo, EU, Swarming, UAV, underwater, video

AUAI is supported by:









