
Robohub.org
Three new quadrotor videos demonstrate agile control and the power of machine learning
The team at the ETH Flying Machine Arena has released three new videos, demonstrating quadrotors building tensile structures, tossing a ball back and forth, and refining a figure-eight trajectory using iterative learning. Worth the watch!!
Building Tensile Structures with Flying Machines
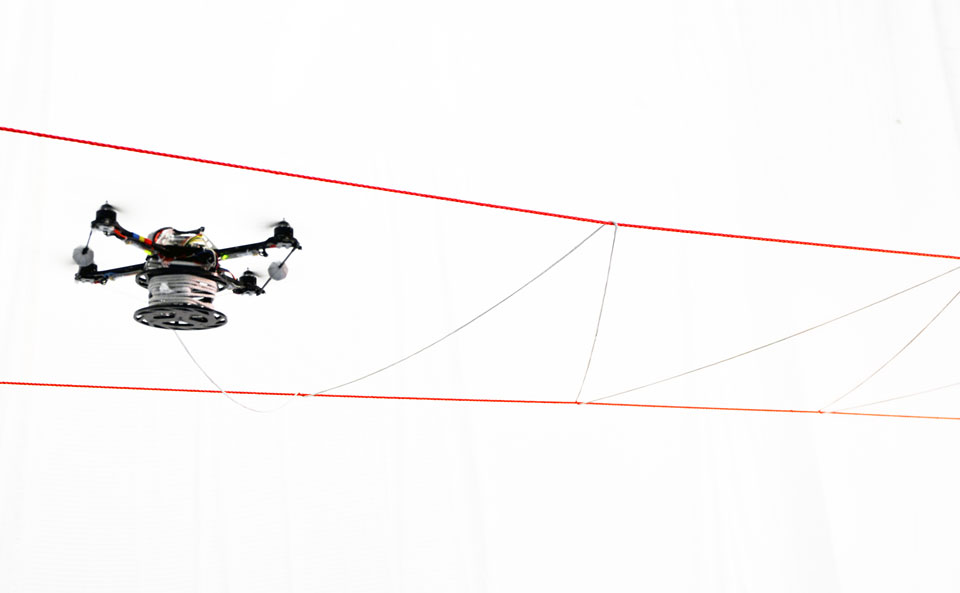
Federico Augugliaro: “This video shows quadrocopters assembling prototypical tensile structures. Part of a body of research in aerial construction – a field that addresses the construction of structures with the aid of flying machines – the video demonstrates that flying machines are capable of autonomously spanning a rope between two support points. They can also create surface structures by using already placed ropes as new support points. Furthermore, multiple machines can work together to extend the type of structures that can be created by this means. The project is a collaboration between the Institute for Dynamic Systems and Control and the Professorship for Architecture and Digital Fabrication, both from ETH Zurich, Switzerland.”
See Federico’s research paper, a collaboration with Ammar Mirjan, presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems 2013.
Rapid Trajectory Generation for Quadrotors
Mark Mueller: “We have developed a method for rapidly generating and evaluating quadrocopter interception trajectories. Each trajectory goes from an arbitrary initial state (position, velocity and acceleration) to an arbitrary final state. The evaluation of the trajectory includes determining input feasibility, and state feasibility (e.g. that the position of the quadrocopter remains inside a box). Per trajectory, this requires less than two microseconds on a modern laptop computer.
The trajectory generator is used here to generate trajectories to hit a ball towards a target, and determines:
- when to hit the ball
- how high to return the ball
- how much thrust to use at the end of the trajectory.
The trajectory generator is used in a receding horizon implementation, where the optimization is run in closed loop at 50Hz, and only the first part of the trajectory is used as inputs. This allows the system to cope with sensor noise, and deviations in the ball’s flight path.”
See Mark’s research paper, presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems 2013.
Iterative Learning for Periodic Quadrocopter Maneuvers
Markus Hehn: “This video demonstrates an iterative learning algorithm that allows accurate trajectory tracking for quadrocopters executing periodic maneuvers.
The algorithm uses measurements from past executions in order to find corrections that lead to better tracking performance. In order to do this, we measure the tracking error over two laps of the maneuver. The new correction is then computed and applied. After waiting for one lap, we begin measuring again and the next learning step follows. For particularly dynamic maneuvers, we begin the learning process at lower execution speeds. This allows us to initially improve performance under safer conditions, and the algorithm provides a means to then transfer the learned corrections from the lower execution speed to higher speeds. The experience gained at lower speeds thus helps us when flying at high speeds, similar to how people learn skills such as martial arts or playing the piano. The method is also applicable to more complex tasks, shown here by the example of the quadrocopter balancing a pole while following a trajectory.”
See Markus’ research paper, presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems 2013.
tags: Algorithm Controls, c-Aerial, cx-Research-Innovation, ETH Zurich, Flying, Flying Machine Arena, FMA, machine learning, Research, Swiss Robots

AUAI is supported by:









