
Robohub.org
Beginner’s guide to the humanoid robot challenge (DRC)
The first real world trial in the DARPA Robotics Challenge (DRC) will be held on December 20-21 2013 at Homestead Freeway in Florida. Yes, it’s open to the public. Anyone can come along and watch humanoid robots try to perform difficult disaster relief human type tasks. This is the geekolympics, it’s nerdvana. Honestly, it’s like sport only better. Here’s the basic background and the rundown on the top teams.
The DRC was inspired in part by recent disasters like Fukushima. In the DRC 2013 trials, the robots will need to perform disaster response operations such as driving a utility vehicle, traveling dismounted across rubble, removing debris from doorway, opening doors, climbing ladders, using power tools, locating and closing valves near a leaky pipe and connecting and using a hose. Connectivity with the robot may also be compromised during the Challenge. Simple tasks for a human but very very difficult for a humanoid robot.

BACKGROUND
DARPA’s Grand Challenges are designed to speed up important research in an area that has been previously difficult but has the potential to provide great changes. The idea of a grand challenge has a long history. Great achievements have come from competitions for centuries, from the invention of the pocket watch for longitude calculations to Lindbergh’s transatlantic flight, from the introduction of the potato to the development of canning.
The rapid progress we’ve seen in driverless cars in the last decade owes everything to the last DARPA Grand Challenge. In 2004, DARPA held the first autonomous vehicle grand challenge, offering $1million prize money for a vehicle that could complete a 150 mile desert course. In 2004, the best result was 7.32 miles from the CMU team. DARPA offered a $2million prize for a repeat challenge in 2005 and this time all but 1 of the 23 finalists travelled further than 7.32 miles and 7 teams completed the course.
In 2007, the Grand Challenge was relaunched as an urban environment challenge. Eighty-nine applicants were whittled down to 35 contenders. Six teams successfully finished the course. By 2011, driverless vehicles were a commonplace sight on the 101 near Google HQ, with no reported accidents. That’s less than 10 years from zero to 65mph on the freeway.

Now we’re about to see the first real trials of the DARPA Grand Challenge for humanoid robots. Or at least for robots capable of working in a human environment. They don’t have to look humanoid but most of them do. In July of 2013, the first round of simulated trials was held to winnow down the 26 teams from 8 countries who had qualified to compete in the Gazebo VRC simulated environment.
”The reason we had this virtual challenge is that we wanted to open the contest to teams whose strength is primarily software,” said Dr Gill Pratt, DRC Program Manager.
After successfully completing 3 simulated disaster response tasks using Gazebo, the finalists should be able to transition their algorithms to ATLAS robots, built by Boston Dynamics for the physical DRC. The open source simulator will be an ongoing legacy for the robotics community, according to Brian Gerkey, the CEO of OSRF, the Open Source Robotics Foundation.
“The simulation work that we’re doing is really part of a broader effort to build a common ecosystem of software tools and libraries that everyone can use.” said Brian Gerkey, OSRF, in an earlier article on Robohub.
MEET THE TEAMS
The competing teams are either Track A; funded teams who are building their own robot and have passed various evaluations and reviews. Track B/C; funded/unfunded teams who successfully qualified in the simulator rounds (VRC) and have been given an ATLAS robot for the trials. And finally, Track D; unfunded teams from anywhere who have a humanoid and aren’t afraid to test it. The qualifying teams in the 2013 round will go on to compete again in December 2014, performing the same type of tasks, but with greater difficulty.
TRACK A
| CHIMP | |
 |
CMU-NREC proposed to develop the CHIMP (CMU Highly Intelligent Mobile Platform) robot for executing complex tasks in dangerous, degraded, human-engineered environments. CHIMP will have near-human form factor, work-envelope, strength and dexterity to work effectively in such environments, yet avoid the need for complex control by maintaining static rather than dynamic stability. |
| Pittsburgh, PA | CMU Carnegie Mellon University | NREC National Robotics Engineering Center |
| Hubo | |
 |
Drexel University’s design focuses on a mature, open-architecture, bipedal robot call Hubo. Each member on Drexel’s team will be equipped with a stock Hubo, a complete, full sized humanoid. This infrastructure will catalyze a multi-university effort to “hit the ground running” and successfully address all anticipated DRC events in a “program-test-perfect” model. |
| Philadelphia, PA | Drexel University |
| RoboSimian | |
 |
JPL proposed to build RoboSimian, an apelike bio-inspired, limbed robot that will use deliberate and stable operations to complete challenging tasks under supervised teleoperation. The team, which includes contributions from the California Institute of Technology, Pasadena, Calif., Stanford University and the University of California, Santa Barbara, will employ design methods, system elements and software algorithms that have already been successfully demonstrated in JPL’s existing robots. |
| Pasadena, CA | Jet Propulsion Laboratory |
| Valkyrie | |
 |
NASA Johnson Space Center proposed to develop a next-generation humanoid robot and control paradigm capable of performing dynamic, dexterous and perception-intensive tasks in a variety of scenarios. NASA JSC’s development approach will apply successful practices that have been used to develop multiple generations of Robonaut and related technologies in collaboration with academic, commercial and other government partners. |
| Houston, TX | NASA Johnson Space Center |
| HRP-2 based biped | |
 |
SCHAFT Inc. proposed a bipedal robot based on mature hardware and software designed for its existing HRP-2 robot. SCHAFT will create an Intelligent Robot Kernel in which it will combine the necessary software modules for recognition, planning, motion generation, motion control and a user interface. The group will divide into three teams to execute the tasks: hardware design, software integration and scenario testing.. |
| JAPAN | SCHAFT Inc. |
| THOR-OP | |
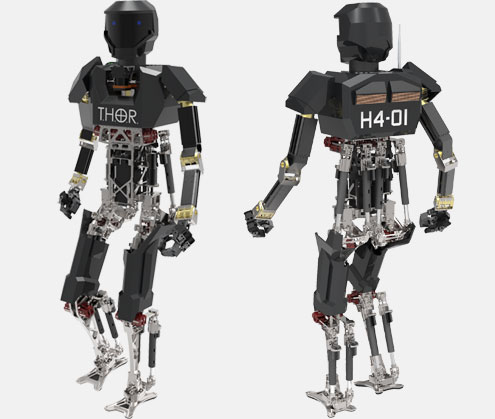 |
Virginia Tech proposed to develop THOR, a Tactical Hazardous Operations Robot, which will be state-of-the-art, light, agile and resilient with perception, planning and human interface technology that infers a human operator’s intent, allowing seamless, intuitive control across the autonomy spectrum. The team will emphasize three essential themes in developing THOR: hardware resilience, robust autonomy and intuitive operation. |
| Blacksburg, VA | Virginia Tech |
Here’s a short video of all the Track A teams in action:
TRACK B/C (with ATLAS robots)
| Team IHMC | |
 |
The IHMC team is confident it has an innovative approach to combine the cognitive abilities of humans, computational power, and the physical abilities of robots to handle novel situations in a new way. |
| Pensacola, FL | Florida Institute for Human and Machine Cognition |
| WRECS | |
|
Team WRECS strives to foster a dedicated and well-managed team, composed of students, professors, and professional engineers, collaborating to discover and lead the state-of-the-art research enabling advanced human-level performance for the Atlas humanoid. We aim to publicly demonstrate the successful completion of tasks related to major disaster response with the intent of leading to relevant peer-reviewed publications, credibility for future DARPA solicitations, and the ultimate goal of winning the DARPA Robotics Challenge. |
| Worcester, MA | WPI Robotics Engineering C Squad (WRECS) Worcester Polytechnic Inc |
| MIT | |
|
The MIT team, based at CSAIL, is drawing on research that is underway in several MIT departments and labs. For example, Teller’s own research group is developing methods that make it possible for robots to interpret sensor data, allowing them to make sense of their surroundings and understand their movements. They are also creating human-robot interaction methods by which humans can help robots formulate and carry out plans. State-of-the-art, real-time planning and control methods that are being developed in Tedrake’s lab make it possible for humanoid robots to balance, walk and climb. |
| Boston, MA | MIT Massachusetts Institute of Technology |
| TRACLabs | |
|
Over the past 15 years, TRACLAbs has used its 3T robot intelligence software to program robots to search for, find and recognize people, to recognize a user’s gestures to carry out tasks, to perform inspection tasks for the International Space Station, to hunt for mines underwater, and to form teams with humans to carry out repair and replacement tasks on earth or in space. We have also extended our approach to intelligent robotics to include graphical and natural language interfaces. So users of TRACLabs robots can motion-to, speak-to or just point-and-click the robots into action. |
| Webster, TX | TRACLabs |
| ViGir (Virginia-Germany Interdisciplinary Robotics) | |
|
TORC engineers have been part of both the DARPA Grand Challenges and the Urban Challenge, where TORC led the software development VictorTango’s 3rd place finish. With two RoboCup world championship titles in autonomous humanoid robot soccer and two RoboCup Best-in-Class Autonomy awards for search and rescue robots, TU Darmstadt adds significant expertise in humanoid and rescue robotics to the team. The team will leverage experience from Virginia Tech’s Center for Human-Computer Interaction (HCI) – a world leader in design and research of novel HCI concepts – and winner of three straight 3D User Interface IEEE competitions. Oregon State will provide expertise in human-inspired robotic grasping and manipulation. |
| Blacksburg, VA | Torc Robotics | TU Darmstadt | Virginia Tech | Oregon State University |
| TROOPER | |
|
“Our team’s software solution controls a robot in a state of ‘supervised autonomy,'” said Bill Borgia, director of Robotic Systems at Lockheed Martin ATL. “This means a robot completes simple tasks independent of the operator. Then, if there’s something tricky the robot can’t work independently, a remote, and largely untrained, operator will step in and assist.” Lockheed Martin ATL is partnered with Rensselaer Polytechnic Institute (RPI) and University of Pennsylvania (GRASP Lab) for the effort. |
| Cherry Hill, NJ | Lockheed Martin | University of Pennsylvania | Rensselaer Polytechnic Institute |
| Team HKU | |
|
“It is a significant accomplishment for our new initiative to produce a team that made it into the top 10 worldwide in its first attempt,” said Professor Norman Tien, HKU Dean of Engineering. “It is encouraging to note that researchers from the US, Japan and partner institution like the university of Edinburgh will join hands with HJU Team in developing advanced and sophisticated software, ie. cultivating a brain for the robot,” he added. |
| Hong Kong | Hong Kong University | Team K Japan | Case Western University |
The ATLAS robot is based on the Petman humanoid robot platform and has been specifically developed by Boston Dynamics for teams in Track B/C of the DRC. ATLAS is a hydraulically powered robot in the form of an adult human. It is capable of a variety of natural movements, including dynamic walking, calisthenics and user-programmed behavior. ATLAS has:
- Near-human anthropometry
- 2 arms, 2 legs, torso and head.
- 28 hydraulically actuated joints with closed-loop position & force control
- On-board real time control computer
- Electric power & network tether
- On-board hydraulic pump & thermal mgmt
- Crash protection
- Modular wrists accept 3rd party hands
- Head-mounted sensor package with LIDAR, stereo sensors, dedicated sensor electronics and perception algorithms.
TRACK D
There will also be Track D teams who are unfunded and have built their own robots. Registration for Track D has now closed and DARPA have qualified 4 teams based on video footage of 3 tasks being attempted at the end of October.
| Buddy | |
 |
Team Mojavaton developed an autonomous NISSan Xterra that finished in 13th place (out of 195) in the 2005 DARPA Grand Challenge. Now the self-funded, small but highly passionate and dedicated team of undergraduate students, professors and professional engineers take on the DRC with Buddy. Buddy features 34 electric servo motors that enable him to walk and use his two arms and hands. Buddy is special in that he’s a quadruped not a biped and we’ve made extensive use of 3D printing to build him, so that he’s a lot lighter than many of the other robots. While he’s only 4’8″ tall, his full wingspan is 6′. |
| Grand Junction, CO | Team Mojavaton |
| CHIRON | |
 |
Simple static motion and manipulation is very useful in tasks that require precision and reliability. The Chiron hexapod design gives great dexterity to travel over uneven terrain as well as stable manipulation. The majority of our team members have been focused primarily on hardware component creation, while a smaller number of team members have been focused primarily on software development. Team Chiron has benefited from numerous technology vectors produced by Kairos Autonomi. |
| Salt Lake City, UT | Team Kairos Autonomi |
| Intelligent Pioneer | |
 |
We divided the team into 6 groups, each one is responsible for a subsystem, and the subsystems include integration, machinery, controlling, perception, interaction and environment modeling. Software d and hardware are developed independently. Software in all subsystems is running under ROS architecture. |
| tbc | tbc |
| DRC-HUBO | |
 |
We separate team to develop basic technologies for tasks and each team conquer tasks. 1. Hardware and software Platform: Rainbow Co. 2. Vision: KAIST 3. Motion: KAIST and Rainbow Co. Each teams are involved to each task 1. Walking: SeoulTech and Rainbow Co. 2. Wall: Rainbow Co. 3. Other tasks: KAIST |
| Daejon Metro City, KOREA | Team KAIST |
| WATSON (not progressing to next round) | |
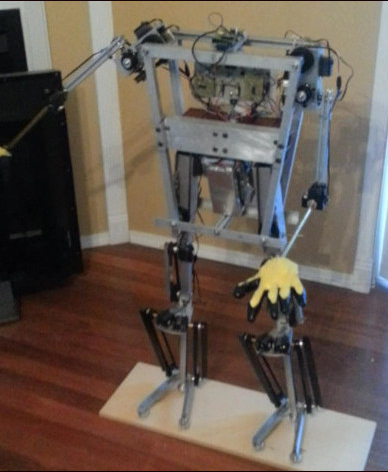 |
Our biped WATSON (Without A Tether Stereoscopic OmniNavigation) was started 6 years ago, but early versions had trouble walking. We have since worked on the two major design areas that allow WATSON to walk and balance. We are now working on a neural net with our smaller platforms that will enable WATSON to learn to walk from the smaller platforms successes while avoiding mistakes with a larger heavier and more expensive robot. |
| Silicon Valley, CA | Team Walk Like A Man | Daniel Albert, Chris Mayer |
Welcome to a wonderful month of robotics. Full reports on the DARPA Robotics Challenge (DRC) are on the DRC website.
tags: c-Research-Innovation, Competition-Challenge, DARPA, DARPA Robotics Challenge, DRC, humanoid

AUAI is supported by:









