
Robohub.org
A variable stiffness fiber that self-heals
A group from Floreano Lab, EPFL and NCCR Robotics has today published their novel variable stiffness fibre with self-healing capability.
Soft “hardware” components are becoming more and more popular solutions within the field of robotics. In fact softness, compliance and foldability bring significant advantages to devices by allowing conformability and safe interactions with users, objects and unstructured environments. However for some applications, the softness of components adversely reduces the range of forces those devices can apply or sustain. An optimal solution would be having components able to vary their softness according to the needed task.
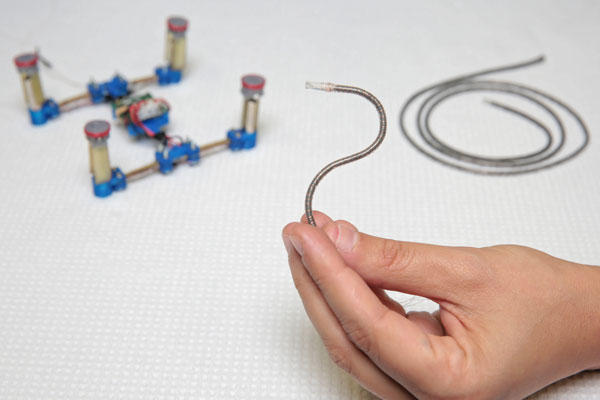
The fibre has a metal core, consisting of low melting point alloys (LMPA), which is contained within a pre-stretched silicone tube. At room temperatures the LMPA is a solid, thus, the fibre is stiff and behaves like a thin metal wire. But when an electrical current is passed through a copper wire coiled around the tube, the LMPA inner core is warmed above 62 oC and melts, thus, the fibre becomes up to 700 times softer and 400 times more deformable.

The second advantage is that if the metallic core breaks it just needs to be heated and — voila! The fibre is fixed! And to top it off, the changing of states occurs in tens of seconds (depending on the current injected and the dimension of the LMPA core).
The fibre has a myriad of real-world applications in the fields of mobile robots, wearable devices and soft systems. Currently, the team is using the fibre to create multi-purpose foldable drones. In fact, the fibre can be morphed into different shapes that are preserved after cooling, ie the four arms of the drone can take different functional morphologies, i.e. deployed in a quadrotor-like configuration for aerial locomotion or bent towards the ground in a four-wheeled configuration for terrestrial locomotion.
Future applications that the team is investigating include in endoscopes and other medical applications, where instruments need to be soft and pliable as they are exploring delicate body cavities, but then need to be able to penetrate resistive biological tissues (e.g. for a biopsy) once they have reached their desired location.
Reference
Tonazzini, A., Mintchev, S., Schubert, B., Mazzolai, B., Shintake, J. and Floreano, D. (2016), Variable Stiffness Fiber with Self-Healing Capability. Adv. Mater.. doi:10.1002/adma.201602580
tags: c-Research-Innovation, EPFL, NCCR Robotics, robohub focus on soft robotics, soft robotics

AUAI is supported by:









