
Robohub.org
Air and ground robot collaborate to map and safely navigate unknown, changing terrain
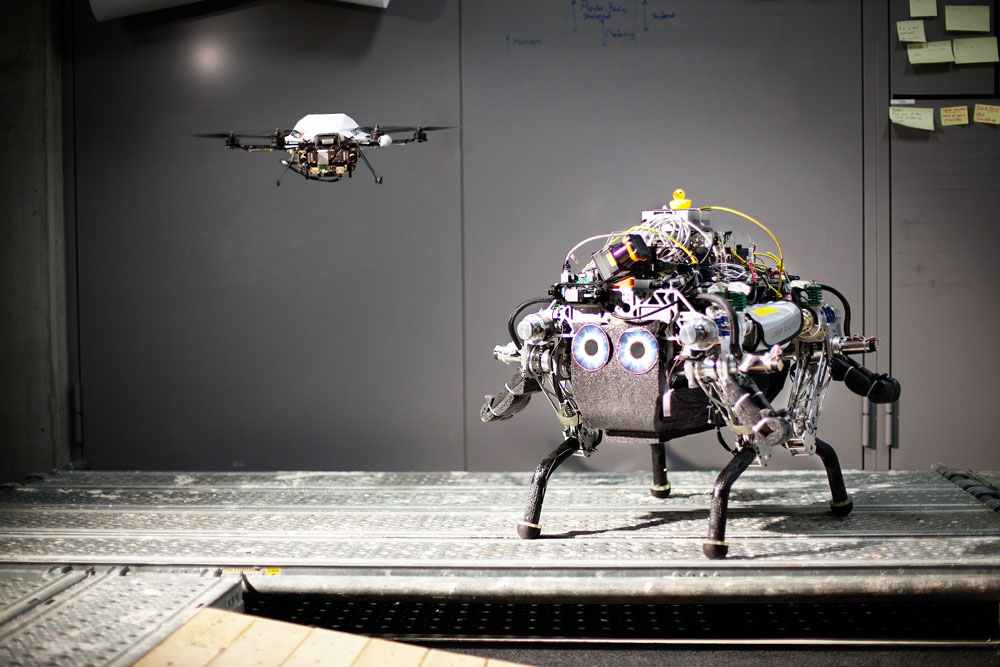 This video shows how a robot team can work together to map and navigate toward a goal in an unknown terrain that may change over time. Using an onboard monocular camera, a flying robot first scouts the area, creating both a map of visual features for simultaneous localization and a dense elevation map of the environment. A legged ground robot then localizes itself against the global map, and uses the elevation map to plan a traversable path to a goal.
This video shows how a robot team can work together to map and navigate toward a goal in an unknown terrain that may change over time. Using an onboard monocular camera, a flying robot first scouts the area, creating both a map of visual features for simultaneous localization and a dense elevation map of the environment. A legged ground robot then localizes itself against the global map, and uses the elevation map to plan a traversable path to a goal.
While following the planned path, the absolute pose corrections are fused with the legged robot’s state estimation and the elevation map is continuously updated with distance measurements from an onboard laser range sensor. This allows the legged robot to safely navigate towards its goal while taking into account any changes in the environment.
More info: http://leggedrobotics.ethz.ch
This work was published as:
P. Fankhauser, M. Bloesch, P. Krüsi, R. Diethelm, M. Wermelinger, T. Schneider, M. Dymczyk, M. Hutter, and R. Siegwart, “Collaborative Navigation for Flying and Walking Robots,” in IEEE International Conference on Intelligent Robots and Systems (IROS), 2016.
tags: Autonomous Systems Lab, c-Research-Innovation, cx-Aerial, cx-Exploration-Mining, Mapping-Surveillance, video



