
Robohub.org
Gecko adhesives allow flying robot to perch on walls
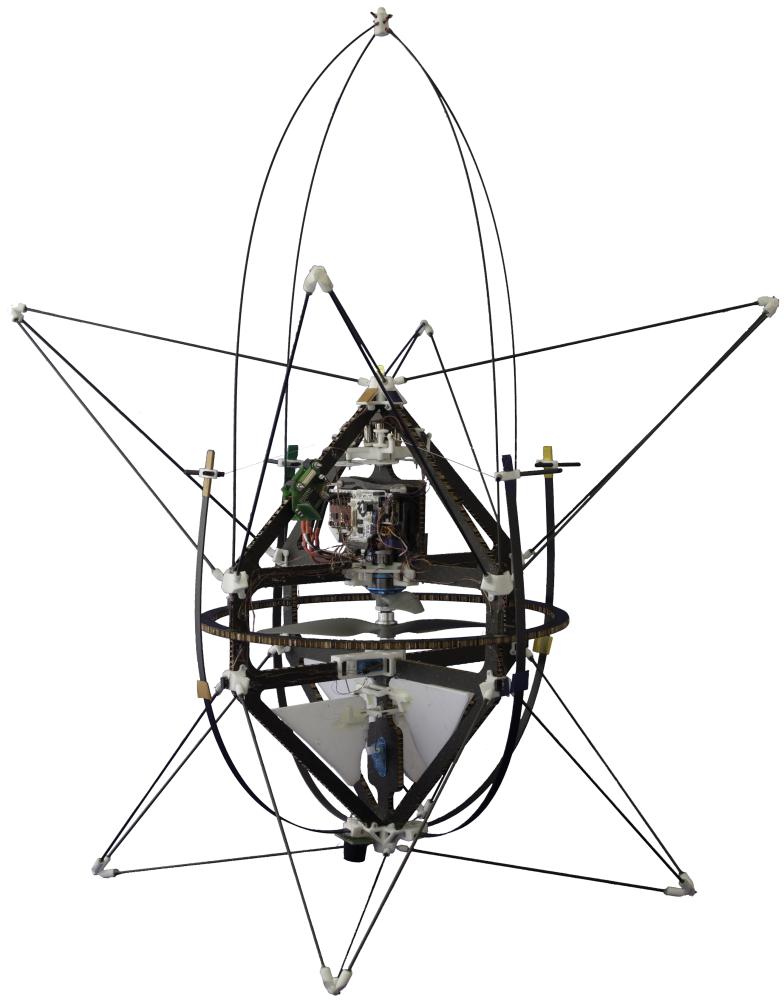
The Airburr, a light-weight flying robot from the Laboratory of Intelligent Systems (my PhD lab) at EPFL, was designed to fly in cluttered environments. Unlike most flying robot, which avoid contact at all cost, the Airburr interacts with its environment to navigate. Just like you might trail your hand along a wall to find your way in the dark, the robot can bounce of walls or follow them without crashing to the ground. In case of a crash, it also has a mechanism to pick itself back up and fly away. I’ve added past videos of the Airburr in action below.
The Airburr can now perch, thanks to a gecko-inspired adhesive pad that is mounted on a mechanism within the structure of the robot. This work was presented last week and ICRA (read the paper here). The gecko pad can be deployed on demand when perching is initiated. Perching allows the robot to power down and save energy, while still providing an aerial perspective that is useful for real-world missions such as search and rescue.
The work was done in collaboration with Mettin Sitti from Carnegie Mellon University, an expert in dry adhesive materials, and was inspired by the hairy feet of geckos. Rather than using claws or sticky substances to climb up walls, geckos use van der Waals forces between the tip of each hair and the surface to cling to. The artificial hairs used on Airburr have a diameter of 40um and a height of 100um with mushroom tips of 80um.
Airburr Crash Recovery
Uprighting Mechanism
tags: Airburr, c-Research-Innovation, EPFL, robot, Swiss Robots, Switzerland

AUAI is supported by:









