
Robohub.org
Robohub highlights 2025

Over the course of the year, we’ve had the pleasure of working with many talented researchers from across the globe. As 2025 draws to a close, we take a look back at some of the excellent blog posts, interviews and podcasts from our contributors.
Teaching robot policies without new demonstrations: interview with Jiahui Zhang and Jesse Zhang

Jiahui Zhang and Jesse Zhang to tell us about their framework for learning robot manipulation tasks solely from language instructions without per-task demonstrations.
CoRL2025 – RobustDexGrasp: dexterous robot hand grasping of nearly any object
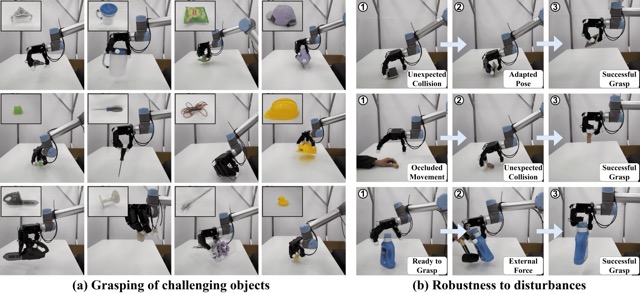
Hui Zhang writes about work presented at CoRL2025 on RobustDexGrasp, a novel framework that tackles different grasping challenges with targeted solutions.
Robot Talk Episode 133 – Creating sociable robot collaborators, with Heather Knight

Robot Talk host Claire Asher chatted to Heather Knight from Oregon State University about applying methods from the performing arts to robotics.
Generations in Dialogue: Human-robot interactions and social robotics with Professor Marynel Vasquez

In this podcast from AAAI, host Ella Lan asked Professor Marynel Vázquez about what inspired her research direction, how her perspective on human-robot interactions has changed over time, robots navigating the social world, and more.
Learning robust controllers that work across many partially observable environments
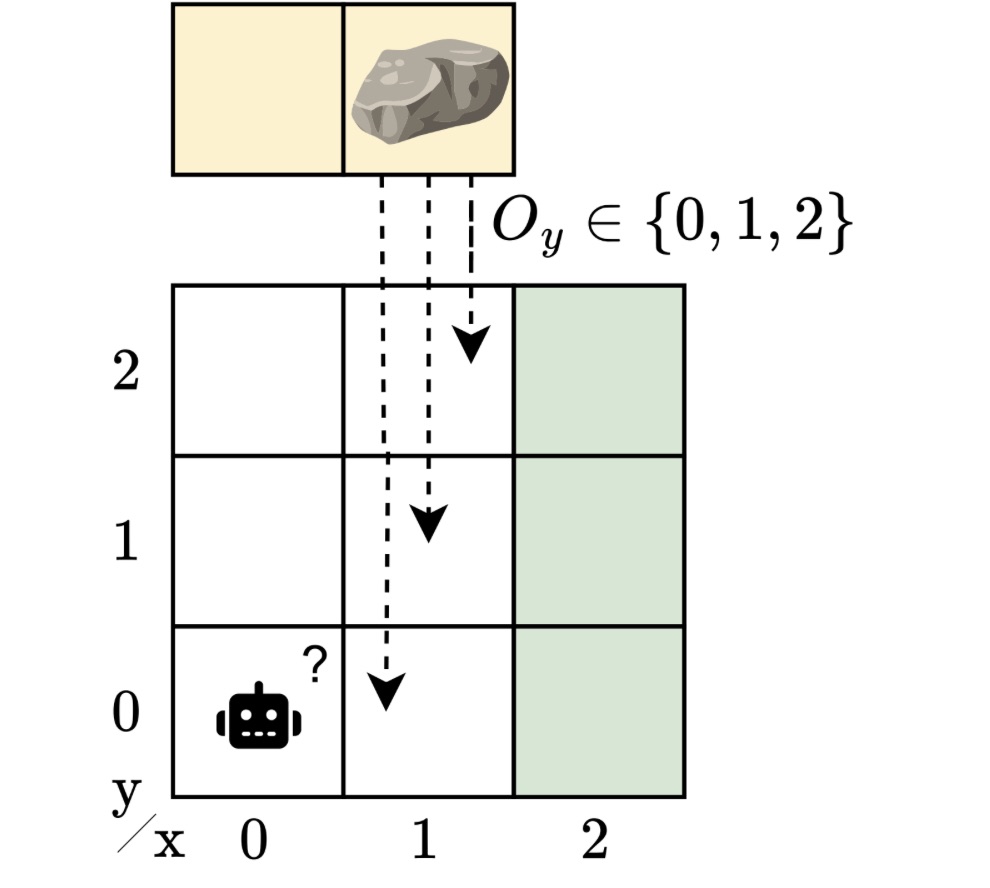
In this blog post, Maris Galesloot summarizes work presented at IJCAI 2025, which explores designing controllers that perform reliably even when the environment may not be precisely known.
Robot Talk Episode 130 – Robots learning from humans, with Chad Jenkins

Claire Asher chatted to Chad Jenkins from University of Michigan about how robots can learn from people and assist us in our daily lives.
Interview with Zahra Ghorrati: developing frameworks for human activity recognition using wearable sensors

Zahra Ghorrati is pursuing her PhD at Purdue University, where her dissertation focuses on developing scalable and adaptive deep learning frameworks for human activity recognition (HAR) using wearable sensors.
Self-supervised learning for soccer ball detection and beyond: interview with winners of the RoboCup 2025 best paper award

We caught up with some of the authors of the RoboCup 2025 best paper award to find out more about the work, how their method can be transferred to applications beyond RoboCup, and their future plans for the competition.
#IJCAI2025 distinguished paper: Combining MORL with restraining bolts to learn normative behaviour
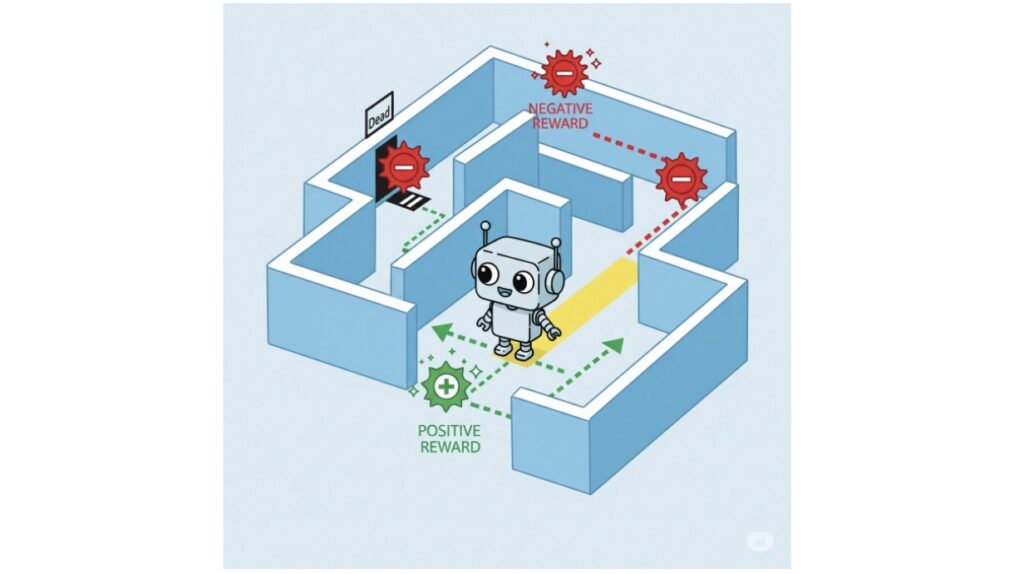
Agata Ciabattoni and Emery Neufeld introduce a framework for guiding reinforcement learning agents to comply with social, legal, and ethical norms.
Robot Talk Episode 114 – Reducing waste with robotics, with Josie Gotz

Claire Asher chatted to Josie Gotz from the Manufacturing Technology Centre about robotics for material recovery, reuse and recycling.
Multi-agent path finding in continuous environments

Kristýna Janovská and Pavel Surynek write about how can a group of agents minimise their journey length whilst avoiding collisions.
RoboCupRescue: an interview with Adam Jacoff

Find out what’s new in the RoboCupRescue League this year.
An interview with Nicolai Ommer: the RoboCup Soccer Small Size League

We caught up with Nicolai to find out more about the Small Size League, how the auto referees work, and how teams use AI.
Interview with Kate Candon: Leveraging explicit and implicit feedback in human-robot interactions

Hear from PhD student Kate about her work on human-robot interactions.
AIhub coffee corner: Agentic AI

The AIhub coffee corner captures the musings of AI experts over a short conversation.
Generations in Dialogue: Multi-agent systems and human-AI interaction with Professor Manuela Veloso

Host Ella Lan chats to Professor Manuela Veloso about her research journey and path into AI, the history and evolution of AI research, inter-generational collaborations, and more.
Preparing for kick-off at RoboCup2025: an interview with General Chair Marco Simões

We spoke to Marco Simões, one of the General Chairs of RoboCup 2025 and President of RoboCup Brazil.
Gearing up for RoboCupJunior: Interview with Ana Patrícia Magalhães
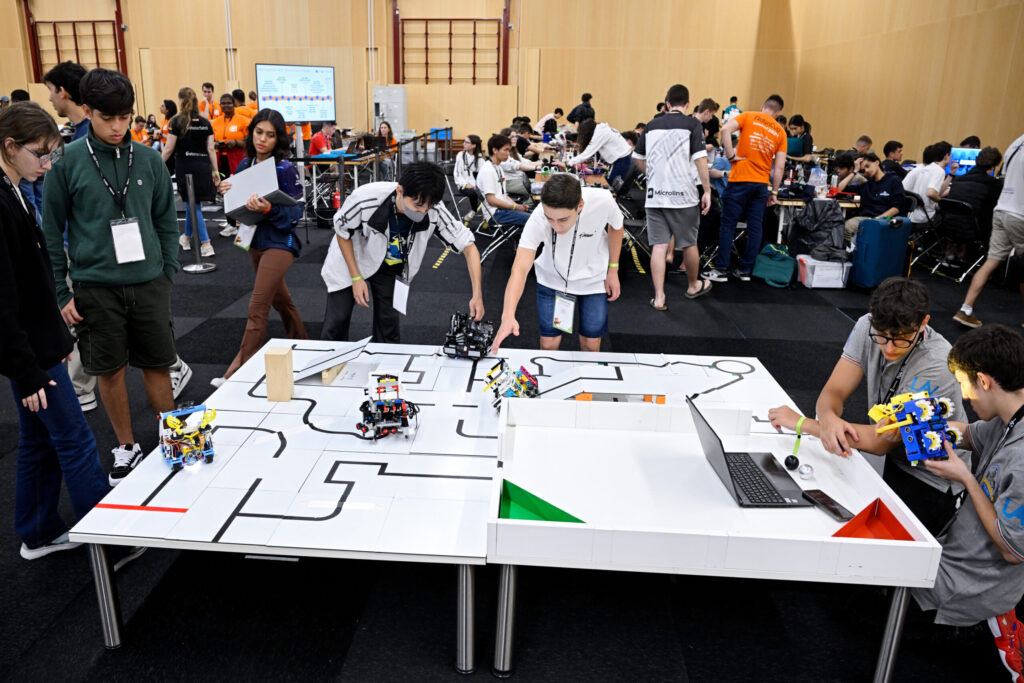
RoboCup Junior Rescue @ WK RoboCup 2024. Photo: RoboCup/Bart van Overbeeke
We heard from the organiser of RoboCupJunior 2025 and find out more about the event.

AUAI is supported by:









