
Robohub.org
Robots in the rough: Demo day at FSR Toronto
Nothing proves a robot’s mettle like a live demonstration in front of a discerning crowd. Check out these photos and videos from Demo Day at the recent Field and Service Robotics conference (FSR) in Toronto.
Tethered Robotic Explorer (TReX)
Autonomous Space Robotics Lab (Tim Barfoot), University of Toronto

June 26, 2015 – Patrick McGarey unveiling the new Tethered Robotic Explorer (TReX) robot to a group of attendees at the Field and Service Robotics conference (FSR) demo day. Photo credit: François Pomerleau – University of Toronto.
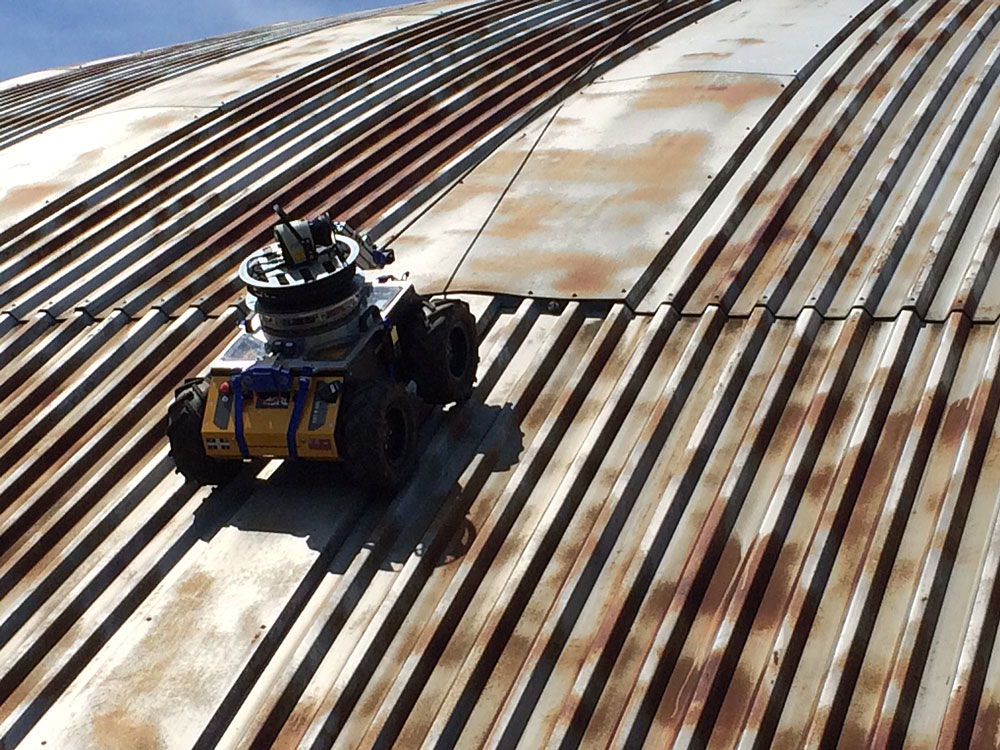
TReX can climb various kinds of steep terrain with the help of its onboard tether management system. Here it climbs a 60 degree metallic roof of the UTIAS Mars Dome. Photo credit: Hallie Siegel.

June 26, 2015 – TReX climbs a small flight of stairs before entering the Mars Dome at UTIAS. Photo credit: François Pomerleau – University of Toronto.

TReX weighs roughly 90 kg and was built on a Husky from Clearpath Robotics. Photo credit: François Pomerleau – University of Toronto.
TReX build
Grizzly RUV
Autonomous Space Robotics Lab (Tim Barfoot), University of Toronto

June 26, 2015 – Grizzly RUV negotiating a sharp turn on a bumpy terrain composed of sand and gravel. The Grizzly RUV is built by Clearpath Robotics and weighs around 1000 kg. Autonomous driving capabilities were demonstrated over a long distance using only one stereo camera in a GPS denied environment. Photo credit: François Pomerleau – University of Toronto.

Grizzly RUV crossing dense vegetation and reaching autonomously one of its intermediate goals under a blue gazebo. The robot can drive through different types of environments — indoors, outdoors, on roads, and through tall grasses — using the same algorithms. Photo credit: François Pomerleau – University of Toronto.
Robust control for quadcopters
Dynamic Systems Lab (Angela Schoellig), University of Toronto

June 26, 2015 – Robust control under large perturbations was demonstrated using a quadcopter tracked by a Vicon system. Photo credit: François Pomerleau – University of Toronto.

June 26, 2105 – Karime Pereida Pérez launching a flight sequence for an Unmanned Aerial Vehicle (UAV). In the background, Rikky Duivenvoorden awaiting to apply interference forces on the UAV from inside the flying arena. Photo credit: François Pomerleau – University of Toronto.
Hexrotor drone
Waterloo Autonomous Vehicles Laboratory (Steven Waslander), University of Waterloo

June 26, 2015 – The Waterloo Autonomous Vehicles Laboratory hexrotor drone, affectionately named Olga, sports three high-speed wide field-of-view cameras, which it uses to determine its own motion in unknown environments. Olga recently flew in Kelowna, BC at the NCFRN Field Trials, where it used the multi-camera cluster to construct maps of cliff faces and hiking trails, similar to those needed in mining and agriculture inspection applications. Photo credit: François Pomerleau – University of Toronto.
SL Commander

June 26, 2015 – The SL Commander with its sensor suite (laser, stereo camera, mono cameras) on a football field. The SL Commander was built by Bombardier Recreational Products (BRP) under the supervision of MDA. The rover is fully electric and weighs around 1200 kg. The maximal speed (40 km/h) and controllability of the platform were demonstrated by remotely operating the vehicle without a driver. Photo credit: François Pomerleau – University of Toronto.
About FSR
The bi-annual Field and Service Robotics conference is focused on applying robots to real-world problems such as monitoring lakes and oceans, autonomous wheelchairs, automated mining, space exploration, drones, and self-driving cars. You can learn more about FSR and the papers presented at this year’s conference on the FSR Toronto website, or check out the FSR Toronto coverage on Robohub. The next edition of FSR is schedule to take place in Zurich, Switzerland in 2017.

June 26, 2015 – Participants of the 10th Conference on Field and Service Robotics (FSR). The conference hosted roughly 100 participants and 42 original scientific papers were presented. Photo credit: François Pomerleau – University of Toronto.
If you liked this article, you may also be interested in:
- Field and service robotics: Live tweets and pics from #FSRToronto
- #ICRA15 photo essay
- Fukushima photo essay: A drone’s eye view
- Robots Podcast: Field robotics
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: Canada, field and service robotics, FSR

AUAI is supported by:









