
Robohub.org
164
M-Blocks with John Romanishin
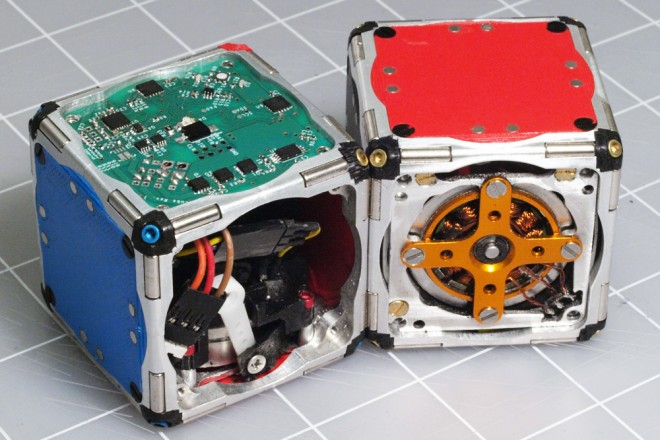

In this episode, Audrow Nash interviews John Romanishin from MIT, about his modular robotics project ‘M-Blocks’. M-Blocks are small cubes (5 cm on a side) that have no external actuators, yet they manage to move and even jump. They do this by rotating an internal mass at high speeds then stopping that mass suddenly, which transfers inertia to the cube causing it to move. The rotating mass can change which plane it’s spinning in, allowing the cube to move in any direction. By combining this inertial actuator with permanent magnets, M-Blocks can move over similar robots (or more M-Blocks) and precisely line up. The future of this project is best put by John, who says, “We want hundreds of cubes, scattered randomly across the floor, to be able to identify each other, coalesce, and autonomously transform into a chair, or a ladder, or a desk, on demand.”

John Romanishin
John Romanishin is currently a graduate student studying mechanical engineering and researching self-reconfigurable modular robots at the Distributed Robotics Laboratory led by Daniela Rus at MIT.
Links:
- Download mp3 (12.6MB)
- Subscribe to Robots using iTunes
- Subscribe to Robots using RSS
- John Romanishin’s website
tags: c-Research-Innovation, CSAIL



