
Robohub.org
Quadrocopter failsafe algorithm: Recovery after propeller loss
UPDATE 04/03/2014:
In this video update, we show that a quadrocopter can be safely piloted by hand after a motor fails, without the aid of a motion capture system. This follows our previous video, where we demonstrated how a complete propeller failure can be automatically detected, and that a quadrocopter can still maintain stable flight despite the complete loss of a propeller.
In the earlier video, we relied on an external motion capture system to measure the quadrocopter’s position and orientation. By moving more of the algorithm onto the vehicle, the quadrocopter can now be piloted by hand after the failure. The algorithm is executed on the quadrocopter’s onboard micro-controller, and the only sensors required are the quadrocopter’s angular rate gyroscopes. We use blinking LEDs, mounted on the quadrocopter’s arms, to indicate a virtual yaw angle, so that the pilot can control the vehicle with the same remote control commands after the failure. As an alternative to the LED system, an onboard magnetometer could be used to track the vehicle’s yaw angle. Alternatively, by using more sophisticated algorithms, the system could be made to work using only the rate gyroscopes.
ORIGINAL STORY 02/12/2013
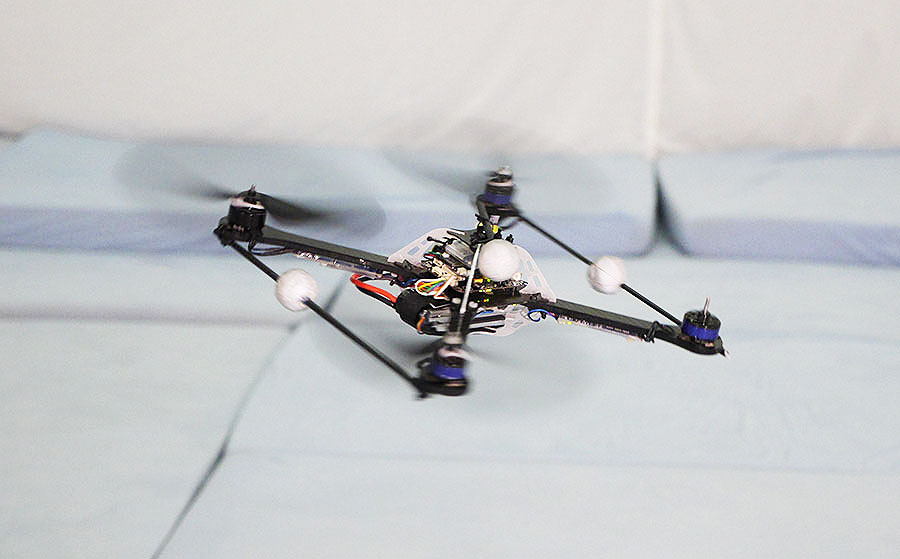
The video in this article shows an automatic failsafe algorithm that allows a quadrocopter to gracefully cope with the loss of a propeller. The propeller was mounted without a nut, and thus eventually vibrates itself loose. The failure is detected automatically by the system, after which the vehicle recovers and returns to its original position. The vehicle finally executes a controlled, soft landing, on a user’s command.
The failsafe controller uses only hardware that is readily available on a standard quadrocopter, and could thus be implemented as an algorithmic-only upgrade to existing systems. Until now, the only way a multicopter could survive the loss of a propeller (or motor), is by having redundancy (e.g. hexacopters, octocopters). However, this redundancy comes at the cost of additional structural weight, reducing the vehicle’s useful payload. Using this technology, (more efficient) quadrocopters can be used in safety critical applications, because they still have the ability to gracefully recover from a motor/propeller failure.
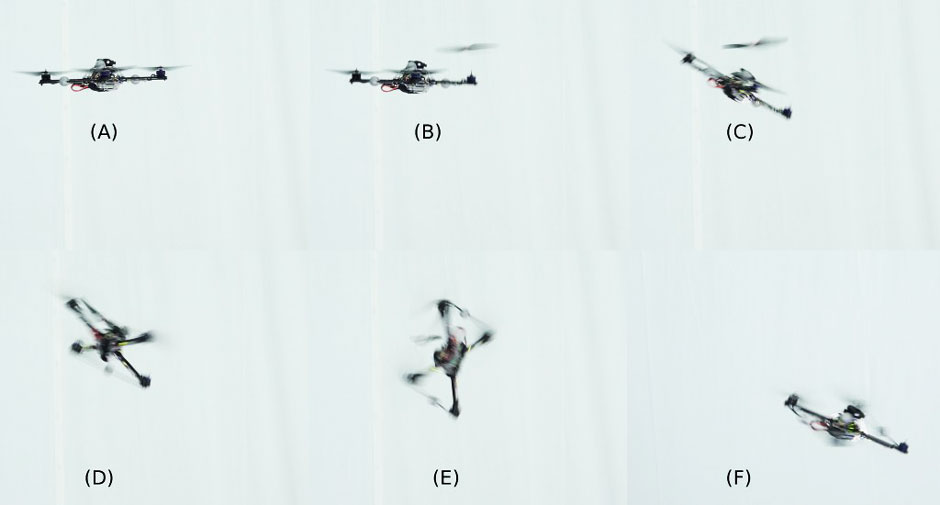
The key functionality of the failsafe controller is a novel algorithm that I developed as part of my doctoral research at the Institute for Dynamic Systems and Control at ETH Zurich. This new approach allows such a vehicle to remain in flight despite the loss of one, two, or even three propellers. Having lost one (or more) propellers, the vehicle enters a continuous rotation — we then control the direction of this axis of rotation, and the total thrust that the vehicle produces, allowing us to control the vehicle’s acceleration and thus position.
Even if the vehicle can no longer produce sufficient thrust to support its own weight, this technology would still be useful: one could, for example, try to minimize the multicopter’s velocity when it hits the ground, or steer the multicopter away from dangerous situations such as water, or people on the ground.
This control approach can also be applied to design novel flying vehicles — we will be releasing some related results soon.
This technology is patent pending.
For more information, have a look at the Flying Machine Arena website, the IDSC research page, or just post your question in the comments below.
If you liked this article, you may also be interested in:
- Three new quadrotor videos demonstrate agile control and the power of machine learning
- Live at TED Global 2013: Tweets, photos and video for quadrotor fans
- Behind the scenes at TED Global: Raffaello D’Andrea and team demo amazing quadrotor “athletes”
- Quadrocopters learn from prior experience to improve slalom flying
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: Algorithm Controls, AUV, c-Aerial, cx-Research-Innovation, Drone, ETH Zurich, Flying, Flying Machine Arena, IDSC, Prototype, Raffaello D'Andrea, Robotics technology, Service Professional Logistic, software, Swiss Robots, video

AUAI is supported by:









