
Robohub.org
Termite-Inspired Construction with Justin Werfel
In this episode, we talk to Justin Werfel from the Wyss Institute for Biologically Inspired Engineering at Harvard University about their latest paper published in Science on “Designing Collective Behavior in a Termite-Inspired Robot Construction Team”. This work was done with Kirstin Petersen and Radhika Nagpal, director of the Self-Organizing Systems Research Group.
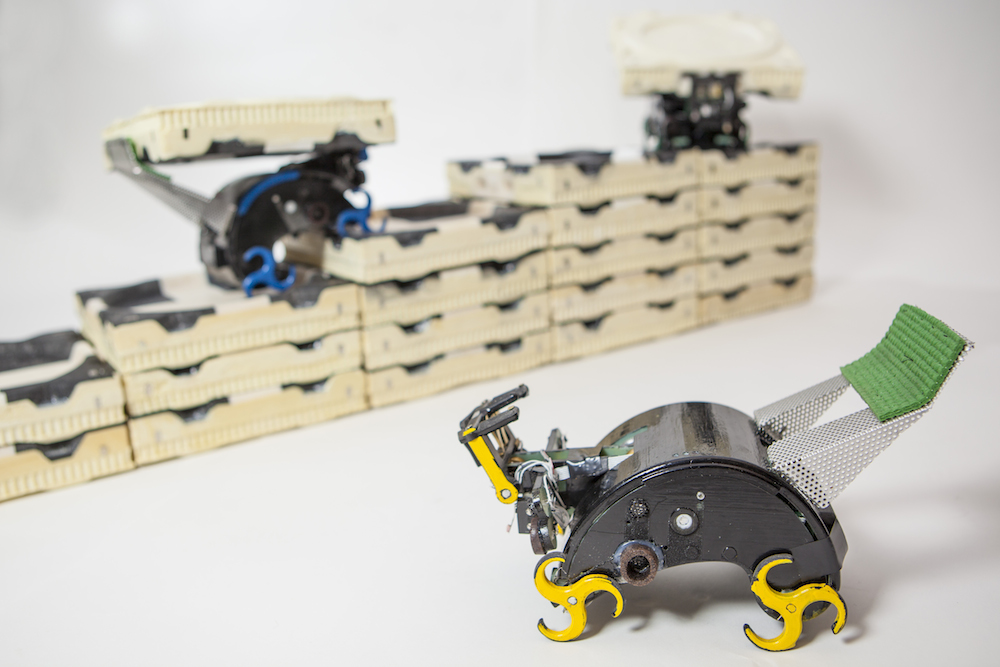
Termites provide a beautiful example of how simple agents, using only local information, can build complex structures such as termite mounds. Taking inspiration from these swarm systems in nature, Werfel and colleagues have created TERMES robots that build three-dimensional structures without the need for any leader or prescribed roles. Such systems are typically scalable (i.e. you can add as many robots as you’d like) and robust to the failure of individual robots, making them ideal candidates for high-risk missions in space or disaster scenarios. The beetle-looking robots are able to carry and deposit blocks and navigate a structure. The challenge is to determine the simple rules the robots need to follow and that will give rise to the desired structure. To decide what rule to apply at a given time, the robots simply observe their local environment, checking if there is a block or not in front of them, and determining if they should add one as a result. This form of communication through the environment is called stigmergy and is an important concept in swarm systems. In the future, the authors hope to use their expertise to learn more about how termites are able to build their mounds.
Justin Werfel
 Justin Werfel is a research scientist at Harvard’s Wyss Institute for Biologically Inspired Engineering. His research interests are in the understanding and design of complex and emergent systems. He is currently working on the development of robotic systems motivated by biological collectives, such as ant colonies, termites, and cellular slime molds, with Wyss faculty including Radhika Nagpal and Rob Wood. He completed his Ph.D. at MIT in 2006, developing algorithms to allow swarms of simple robots to autonomously build user-specified structures. His postdoctoral research at Harvard included further exploration of collective construction, work on the evolution of cooperative and altruistic behaviors at the New England Complex Systems Institute, and cancer modeling at Harvard Medical School/Children’s Hospital Boston.
Justin Werfel is a research scientist at Harvard’s Wyss Institute for Biologically Inspired Engineering. His research interests are in the understanding and design of complex and emergent systems. He is currently working on the development of robotic systems motivated by biological collectives, such as ant colonies, termites, and cellular slime molds, with Wyss faculty including Radhika Nagpal and Rob Wood. He completed his Ph.D. at MIT in 2006, developing algorithms to allow swarms of simple robots to autonomously build user-specified structures. His postdoctoral research at Harvard included further exploration of collective construction, work on the evolution of cooperative and altruistic behaviors at the New England Complex Systems Institute, and cancer modeling at Harvard Medical School/Children’s Hospital Boston.
Links:
tags: bio-inspired, c-Research-Innovation, podcast, Swarming

AUAI is supported by:









