
Robohub.org
Behind the scenes at TED Global: Raffaello D’Andrea and team demo amazing quadrotor “athletes”
With reporting and photos by Dario Brescianini and Mark Mueller and timelapse video by James Duncan Davidson.

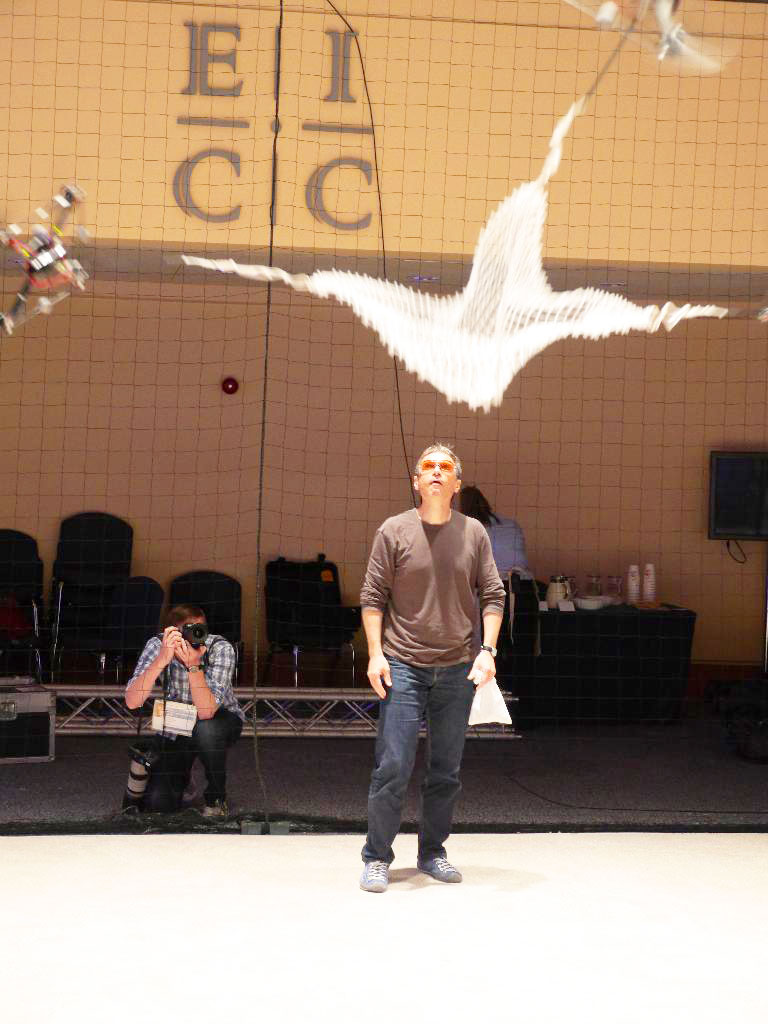
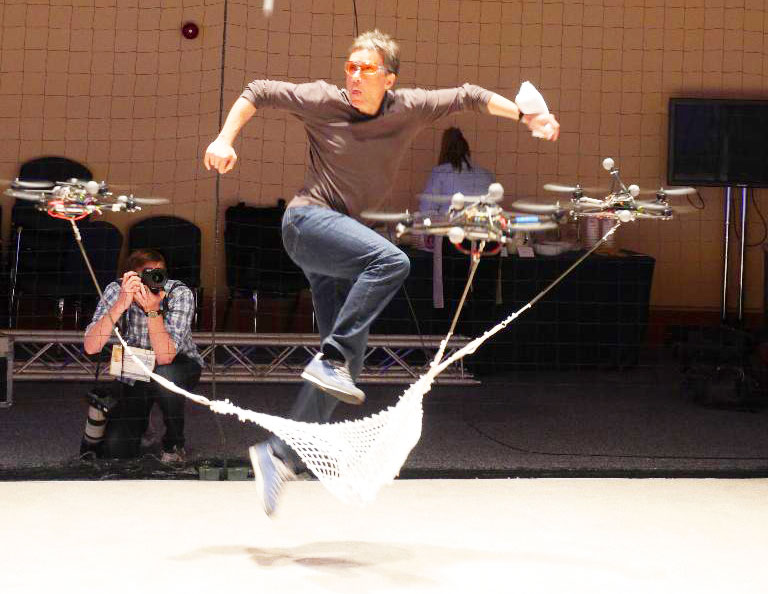
A quadrocopter swoops through the air to serve a glass of water without spilling a drop. Another gets two of its propellers cut off, yet still easily flies across the arena. “It looks like magic!” says ETH Zurich‘s Raffaello D’Andrea, but it took a lot of research, hard work and planning to bring this ‘magic trick’ to TED Global.
This post is part of Robohub’s TED Global 2013 coverage.

D’Andrea’s talk is about “Machine Athleticism” — the ability of machines to perform dynamic feats that fully exploit their physical capabilities. Part of a session called “Those Flying Things” (which also features the work of drone ecologist Lian Pin Koh, airborne logistics activist Andreas Raptopoulos and sci-fi author Daniel Suarez), D’Andrea delves into what it takes to make a machine athlete:
We use something broadly called Model Based Design: we first build physics-based models that roughly capture the behavior of the machine; these models are then leveraged by a branch of mathematics called Control Theory to synthesize algorithms for controlling them.
He goes on to show a series of pretty amazing quadrotor feats that would be impossible without sophisticated automatic feedback. TED just posted an update on their blog about the demo here, and we will link to the video of the talk as soon as it goes online.
Clearly a lot of work has gone on behind the scenes to get D’Andrea and his team to TED. It’s taken years of research and a whole crew of PhD and Master students to develop the infrastructure and algorithms that make this demonstration possible — and that was just to get to the point where they could do the demos in-house.

D’Andrea and his team usually research and demo their quadrotor tricks at the ETH Flying Machine Arena — a 10x10x10m airspace dedicated to the study of control algorithms, and featuring a high-precision motion capture system, a wireless communication network, and custom software for executing estimation and control. Though the FMA normally lives at its home base at the Swiss Federal Institute of Technology (ETH) in Zurich, it was designed from the outset to be portable, and TED Global is not the first time it has taken to the road:
In 2011 they set up at the FRAC Centre in Orléans, France to create a six metre-high tower – the first architectural installation built by flying machines (see video). Last year the team showed their work at the world’s largest industrial fair, Germany’s Hannover Messe and at Google’s annual flagship conference Google IO in San Francisco.

Still, it takes a lot of time and careful planning to recreate the set up at a new site, and on this occasion they were planning a video shoot as well as a live audience. Says Mark Mueller, one of the team members onsite at TED, “Since April, all of us here have been working full-time, 100% on TED,” referring to all the various administrative hurdles they had to cross, such as planning logistics and agreeing on the space, in addition to rehearsing the demo itself. And then there was the packing to do: “It boils down to fifteen cases, boxes and bags,” says Dario Brescianinini, another member of the crew.

D’Andrea and his team arrived in Edinburgh, Scotland (the host city of TED Global 2013) late Saturday afternoon ahead of most other TED speakers, and started setting up almost right away in a dedicated room where the talk was filmed and where all their demonstrations will take place throughout the week. According to Brescianini and Mueller, it took about three-and-a-half hours to get the first quadrotor hovering. On Sunday they rehearsed the talk — and especially the transitions between each demo — in preparation for the video shoot, which was done in advance of the live talk.

Despite a few hiccups (two quads were damaged during setup and some repairs had to be done on the fly), Monday’s shoot went pretty smoothly. “It took about two-and-a-half hours, but we did one talk without breaks and had most of the things filmed after twenty-five minutes,” says Brescianini. It was a busy set, with fifteen TED crew members, seven people from D’Andrea’s team and one photographer. All in all, it took two fixed cameras (4k HD), one Steadicam, and three GoPros (one in the corner on the floor, one on the ceiling facing downwards, and one flying GoPro attached to a quad) to document D’Andrea’s TED talk. An additional camera shot a “making of” video as well. “It’s pretty busy, and we’re all really relieved after the successful filming.”


Want to learn more?
Check out the pages of ETH Zurich’s Flying Machine Arena team and more Robohub articles on how quadrocopters learn acrobatic maneuvers, cooperate to throw and catch balls, perfect air racing, and throw and catch an inverted pendulum.
Full disclosure: Markus Waibel works with Raff D’Andrea and the Flying Machine Arena team at ETH Zurich’s Institute for Dynamic Systems and Control.
See all the posts in Robohub’s TED Global 2013 coverage.
If you liked this article, you may also be interested in:
- Three new quadrotor videos demonstrate agile control and the power of machine learning
- Live at TED Global 2013: Tweets, photos and video for quadrotor fans
- Video: Throwing and catching an inverted pendulum – with quadrocopters
- Quadrocopters learn from prior experience to improve slalom flying
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: Algorithm Controls, ETH Zurich, Event, Flying Machine Arena, quadrotor, Raffaello D'Andrea, Swiss Robots, TED Global, TEDGlobal2013





