
Robohub.org
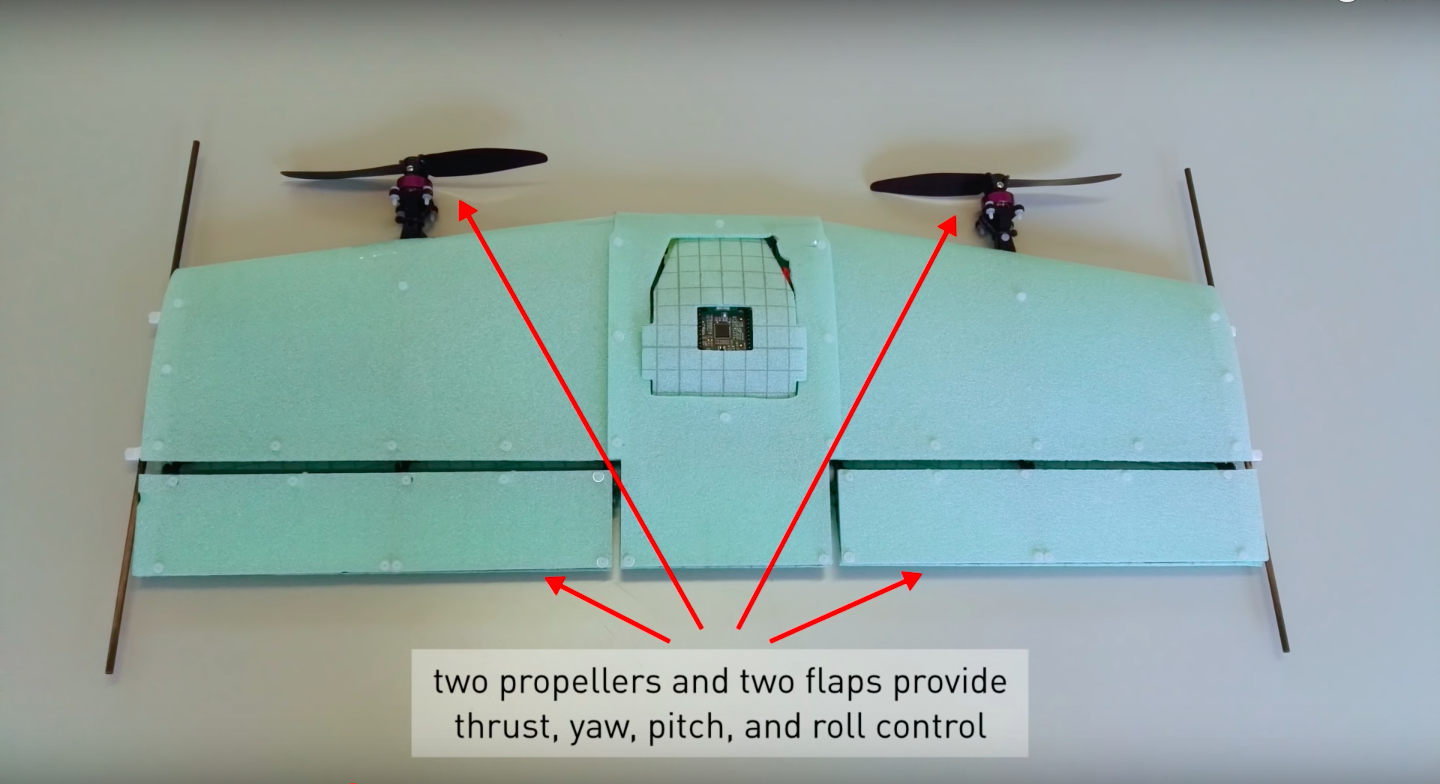
‘IDSC Tailsitter’ flying robot performs vertical loops and easily transitions between hover and forward flight
Source: Robin Ritz, Institute for Dynamic Systems and Control, ETH Zurich.
The IDSC Tailsitter has been designed at the Institute for Dynamic Systems and Control, ETH Zurich, as a testbed for novel control algorithms for tailsitter vehicles. The goal of the project is to develop controllers that enable agile and robust flight for all flight regimes, such that the full potential of these vehicles can be exploited.
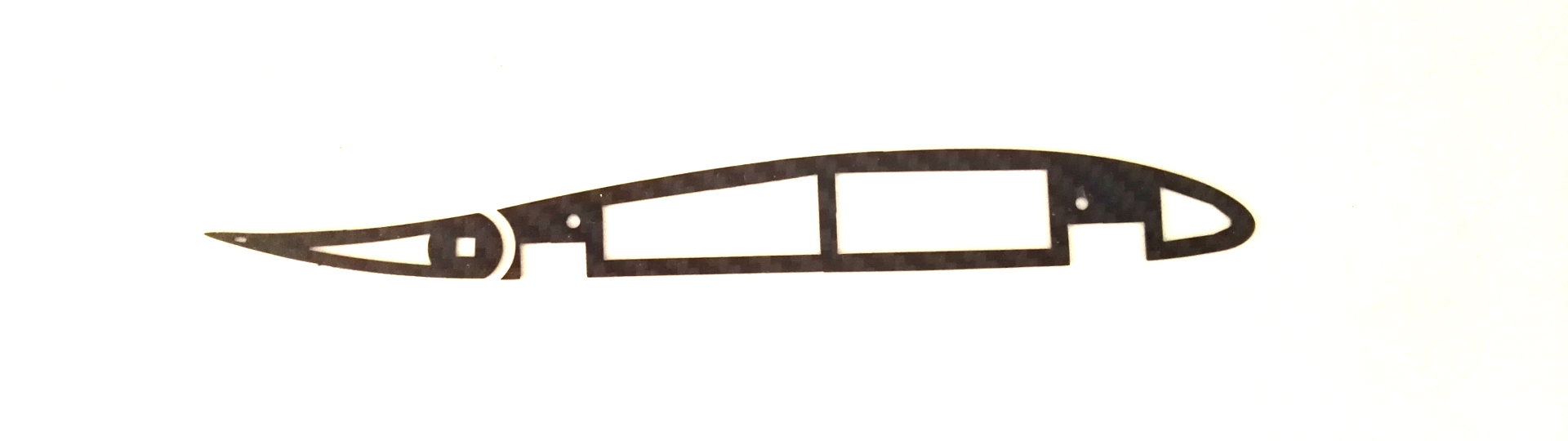
Airframe based on a Clark Y profile. Source: Robin Ritz, Institute for Dynamic Systems and Control, ETH Zurich.
The airframe of the vehicle is based on a Clark Y profile and designed such that for regular flight the pitching moment vanishes for zero flap angle, and such that the aerodynamic neutral point coincides with the vehicle’s center of gravity. The objective of this design is to allow agile maneuvers for all flight regimes and to avoid flap angle saturation problems caused by large trim angles.
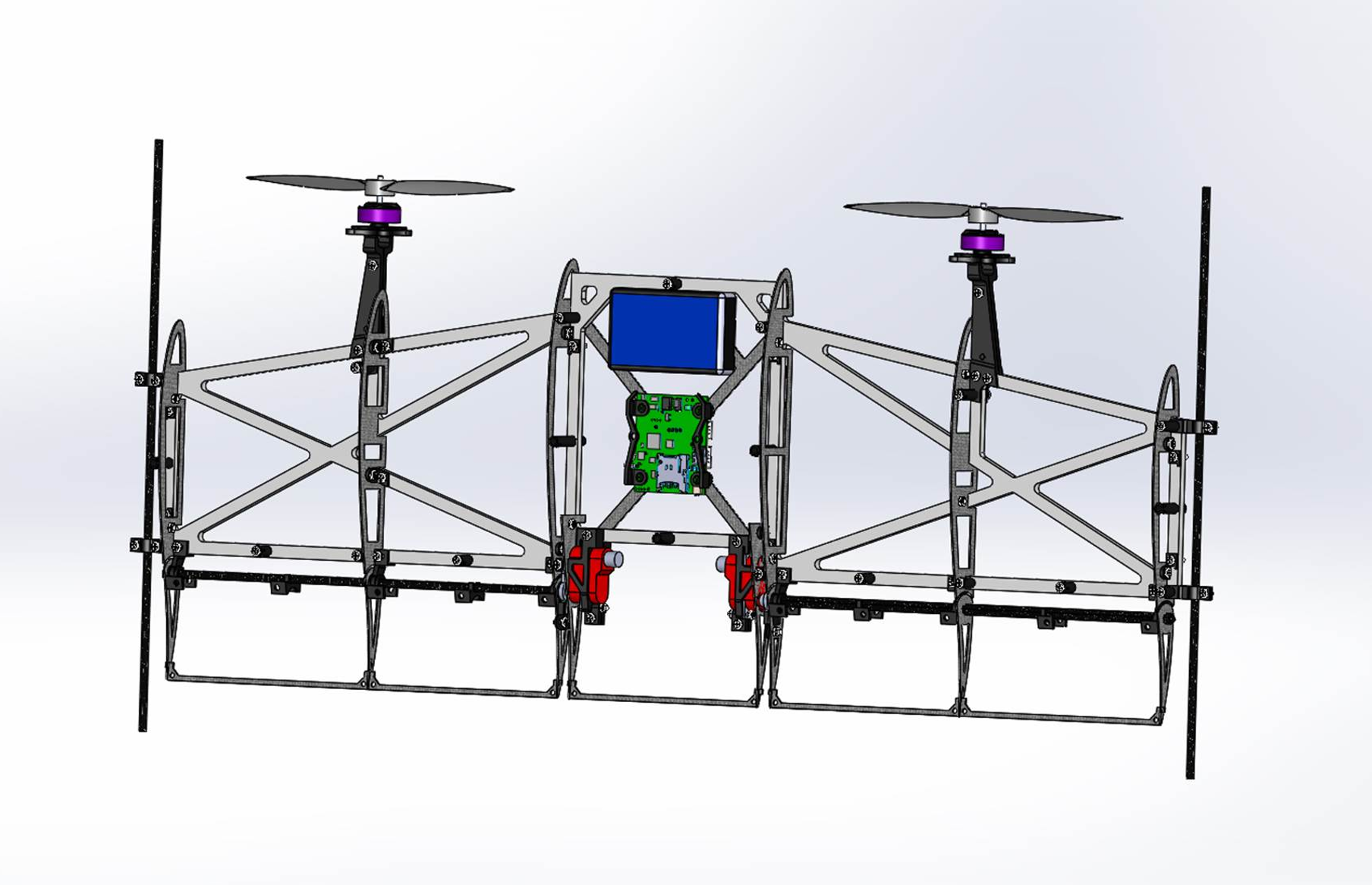
Internal structure. Source: Robin Ritz, Institute for Dynamic Systems and Control, ETH Zurich.
The internal structure of the vehicle is built upon a core of a carbon sandwich composite material. The motors and servos are attached to the core using 3D-printed mountings, where the servos are placed such that they can be directly connected to the flaps. Further, a set of wing profile ribs and two carbon fiber tubes on the side for protection are mounted to the core structure. The electronics are placed at the center of the vehicle, and the battery at the front such that the center of gravity is at the desired position. All parts of the vehicle are screwed together (no glue is used), in order to simplify the replacement of broken components. The tailsitter’s wingspan is 48cm and the total weight is 150g.
The vehicle is controlled by a global controller enabling recovery to hover from any initial condition. A cascaded control architecture is used: Based on position and velocity errors an outer control loop computes a desired attitude keeping the vehicle in coordinated flight, while an inner control loop tracks the desired attitude using a lookup table with precomputed optimal attitude trajectories. The controller runs with an update rate of 500Hz on a Cortex M4F microprocessor. The vehicle is able to communicate with a ground station using an nRF51822 chip from the company Nordic Semiconductor. Communication can be established for recording telemetry data or for sending high-level commands to the vehicle, such as “take-off” or “land”. However, the vehicle is able to fly autonomously, the trajectories that are being tracked are stored on-board.
The on-board state estimation algorithms and technology are provided by the ETH spin-off company Verity Studios.
The attitude control algorithm is presented in the research paper “A Global Strategy for Tailsitter Hover Control”, International Symposium on Robotics Research (ISRR), 2015.
Researchers
Robin Ritz and Raffaello D’Andrea
Institute for Dynamic Systems and Control (IDSC), ETH Zurich, Switzerland
Flying Machine Arena
Technical details
Airframe: Custom design based on a Clark Y profile
Electronics: Custom design using a Cortex M4F microprocessor
Battery: Thunder Power RC G8 Pro Lite 25C LiPo 480mAh 2S
Motors: Hacker A05-13S
Motor controllers: Dys SN20A Mini ESCs with SimonK firmware
Propellers: 5×3 GWS EP-5030
Flap servos: MKS DS65K
Infrastructure: Flying Machine Arena
If you enjoyed this article, you may also want to read:
- ‘Tailsitter’ flying robot hovers and recovers easily thanks to new algorithm
- Multiple tethered quadrotors whip around a pole together at high speeds
- Quadrocopter failsafe algorithm: Recovery after propeller loss
- Three new quadrotor videos demonstrate agile control and the power of machine learning
- Video: Quadrocopter learns from its mistakes, perfects slalom air racing
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: c-Aerial, ETH Zurich, IDSC, Raffaello D'Andrea, Verity Studios

AUAI is supported by:









