
Robohub.org
Audio interviews about the controlled flight of insect robots with Kevin Ma, Pakpong Chirarattananon and Sawyer Fuller
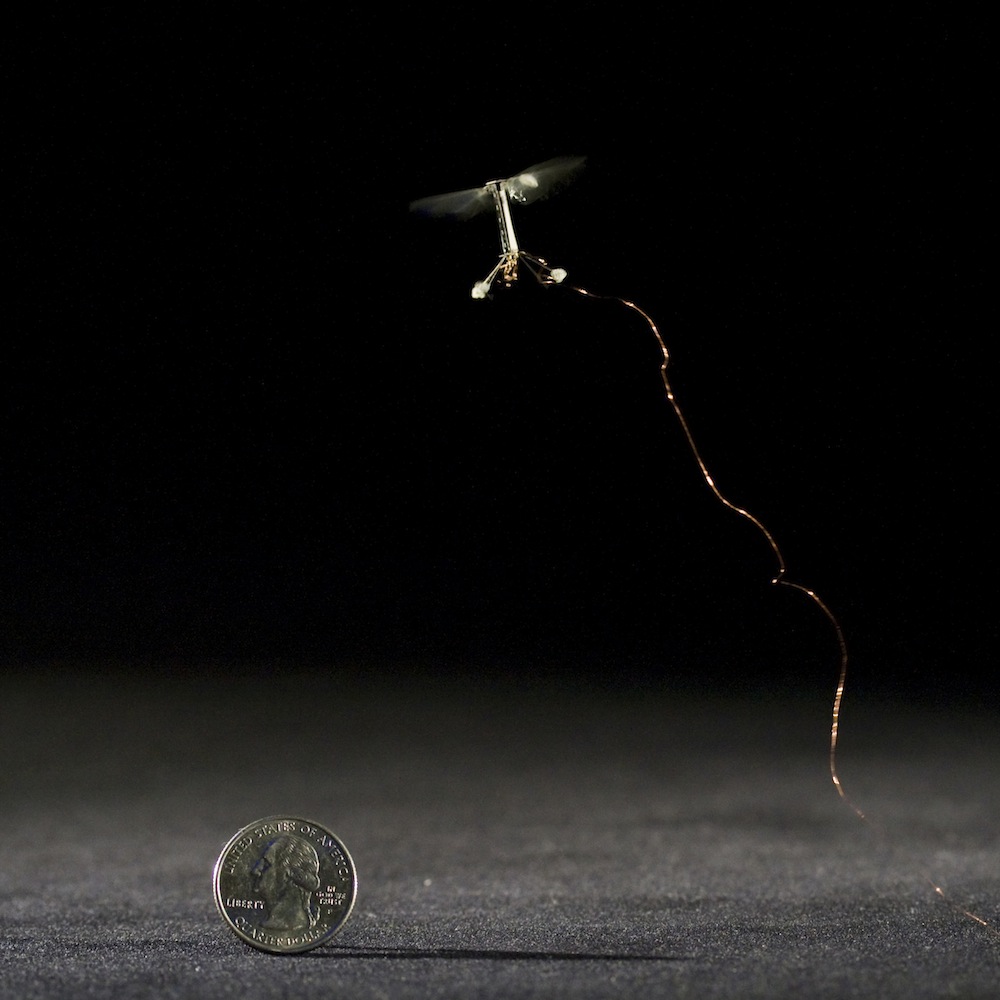
In this episode we hear from researchers at the Harvard Microrobotics Lab about the Science paper published today reporting on the first controlled flight of an insect-sized robot. The amazing high-speed video below shows the robot taking off, hovering in place and steering left and right. This work is part of the Robobees project that aims to make swarms of insect robots.
You can read our full coverage here.
Kevin Ma, Pakpong Chirarattananon and Sawyer Fuller
Kevin Ma and Pakpong Chirarattananon are graduate student researcher at the Harvard Microrobotics Lab working with Prof. Robert Wood (listen to Wood’s podcast here). Kevin studies the design and manufacturing of very small-scale robots while Pakpong’s work focuses on flight control strategies for flapping wing robots. Sawyer Fuller is a postdoctoral researcher with experience in the control and sensing of biological and robotic flies.
Links:
- Download mp3 (14.9MB)
- Subscribe to Robots using iTunes
- Subscribe to Robots using RSS
- Microrobotics Lab
- Science Paper
tags: bio-inspired, c-Aerial, cx-Research-Innovation, Flying, podcast

AUAI is supported by:









