
Robohub.org
Multiple tethered quadrotors performing high-g, high-speed formation maneuvers
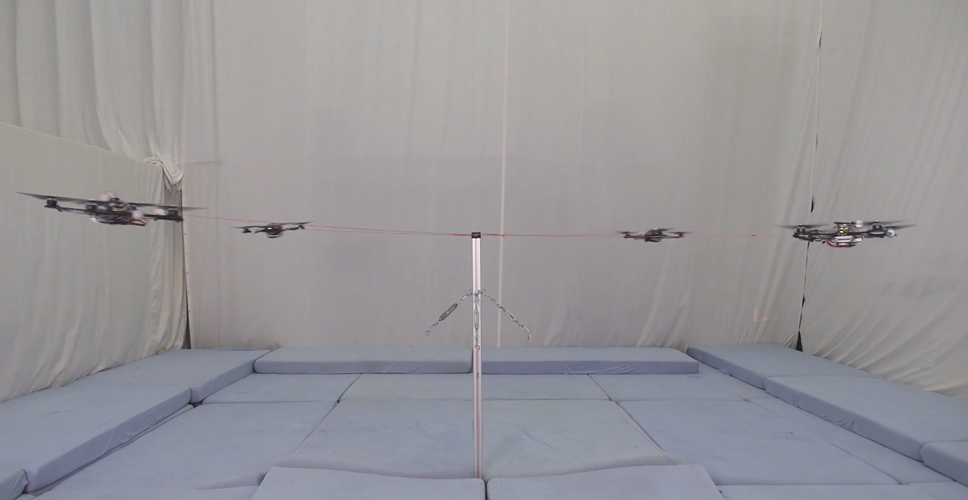 This video shows tethered quadrocopters flying steadily together at high speeds exceeding 50 km/h in a confined space. With the tether exerting more than 13 gs of centripetal force, multiple quadrotors are able to fly 1.7m- radius circular trajectories in formation across different orientations in space and then successfully perform a coordinated braking maneuver.
This video shows tethered quadrocopters flying steadily together at high speeds exceeding 50 km/h in a confined space. With the tether exerting more than 13 gs of centripetal force, multiple quadrotors are able to fly 1.7m- radius circular trajectories in formation across different orientations in space and then successfully perform a coordinated braking maneuver.
The testbed allows the quadrocopter’s high speed flight behavior to be characterized in order to determine drag characteristics, propeller efficiency, and the physical limits of the machine. It is also being used to safely develop high-speed maneuvers such as emergency braking.
Note that it is possible to remove the central pole by balancing the forces acting on the strings; this could be then used in performance settings, possibly enhanced by light and sound effects.
This research was conducted at the Flying Machine Arena at ETH Zurich.
Reference:
Maximilian Schulz, Federico Augugliaro, Robin Ritz, Raffaello D’Andrea , “High-speed, Steady Flight with a Quadrocopter in a Confined Environment Using a Tether “, IROS 2015, submitted.
If you liked this article, you may also be interested in:
- Three new quadrotor videos demonstrate agile control and the power of machine learning
- Quadrocopters learn from prior experience to improve slalom flying
- Surrounded by his quadrocopter drones on stage, Raffaello D’Andrea explains feedback control and talks about the coming Machine Revolution
- Video: Watch flying robots cooperate, throw and catch balls
- Quadrocopter failsafe algorithm: Recovery after propeller loss
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: Algorithm Controls, c-Aerial, cx-Research-Innovation, ETH Zurich, Flying Machine Arena, quadrocopter, Switzerland, UAV, video



