
Robohub.org
237
Deep Learning in Robotics with Sergey Levine
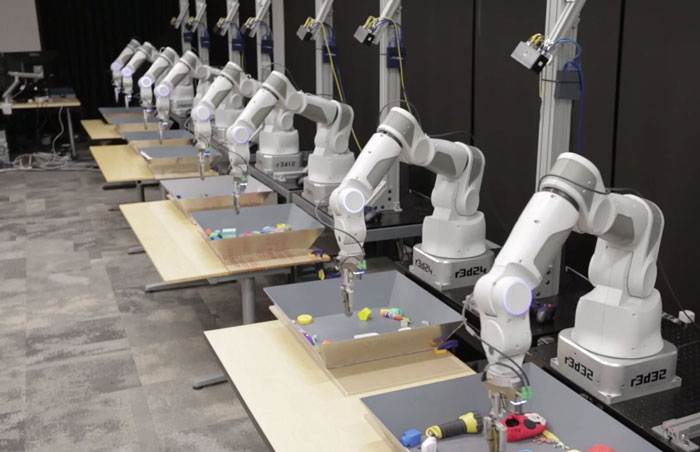

In this episode, Audrow Nash interviews Sergey Levine, assistant professor at UC Berkeley, about deep learning on robotics. Levine explains what deep learning is and he discusses the challenges of using deep learning in robotics. Lastly, Levine speaks about his collaboration with Google and some of the surprising behavior that emerged from his deep learning approach (how the system grasps soft objects).
In addition to the main interview, Audrow interviewed Levine about his professional path. They spoke about what questions motivate him, why his PhD experience was different to what he had expected, the value of self-directed learning, work-life balance, and what he wishes he’d known in graduate school.
A video of Levine’s work in collaboration with Google.
https://www.youtube.com/watch?v=cXaic_k80uM&feature=youtu.be
Sergey Levine
 Sergey Levine is an assistant professor at UC Berkeley. His research focuses on robotics and machine learning. In his PhD thesis, he developed a novel guided policy search algorithm for learning complex neural network control policies, which was later applied to enable a range of robotic tasks, including end-to-end training of policies for perception and control. He has also developed algorithms for learning from demonstration, inverse reinforcement learning, efficient training of stochastic neural networks, computer vision, and data-driven character animation.
Sergey Levine is an assistant professor at UC Berkeley. His research focuses on robotics and machine learning. In his PhD thesis, he developed a novel guided policy search algorithm for learning complex neural network control policies, which was later applied to enable a range of robotic tasks, including end-to-end training of policies for perception and control. He has also developed algorithms for learning from demonstration, inverse reinforcement learning, efficient training of stochastic neural networks, computer vision, and data-driven character animation.
Links
- Download mp3 (16.0 MB)
- Download extra mp3 (7.1 MB)
- Sergey Levine’s website
- Subscribe to Robots using iTunes
- Subscribe to Robots using RSS
tags: Algorithm AI-Cognition, c-Industrial-Automation, Manipulation, podcast, Research, Robotics technology










