
Robohub.org
The Year of CoCoRo Video #05/52: Lily swarm size awareness
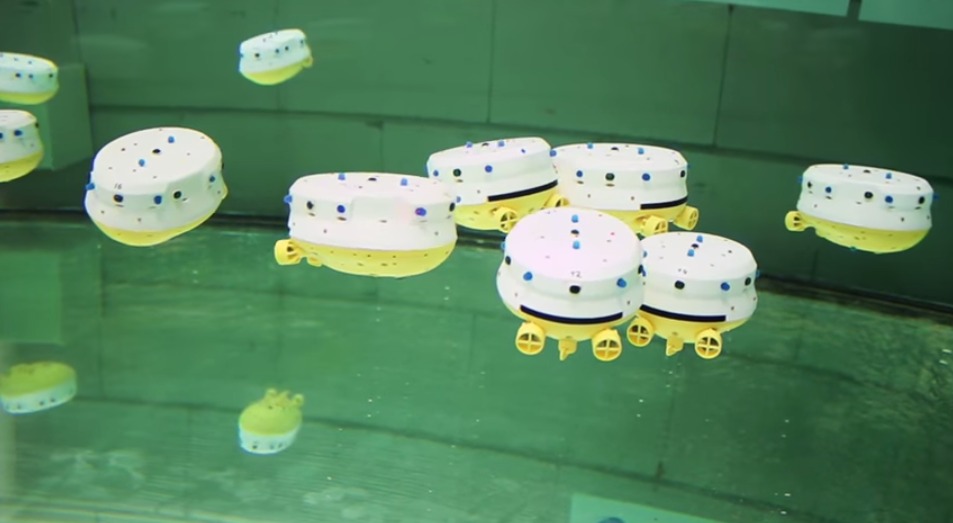
The EU-funded Collective Cognitive Robotics (CoCoRo) project has built a swarm of 41 autonomous underwater vehicles (AUVs) that show collective cognition. Throughout 2015 – The Year of CoCoRo – we will be uploading a new weekly video detailing the latest stage in its development. This video shows how the swarm can estimate its own size.
Lily robots build swarms that change in size over time. By using a bio-inspired method of signal exchange these swarms can make reliable estimates of their own swarm size. Our Lily robots emit a pulsed signal that is relayed by other Lily robots in the swarm, just like slime mold amoebas or fireflies relay their signals in nature. Based on this simple signal exchange every member can estimate the number of other swarm members around it.
To learn more about the project, see this introductory post, or check out all the videos from the Year of CoCoRo on Robohub.
tags: AUV, c-Research-Innovation, CoCoRo, EU, Swarming, UAV, underwater, video

AUAI is supported by:









