
Robohub.org
The Year of CoCoRo Video #35/52: Relay chain communication
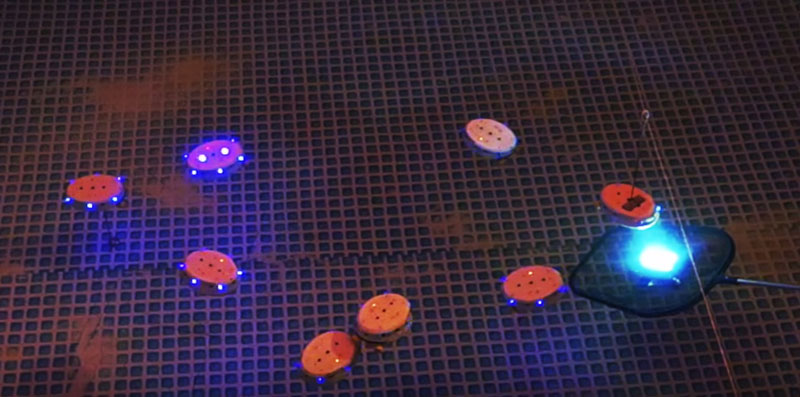 The EU-funded Collective Cognitive Robotics (CoCoRo) project has built a swarm of 41 autonomous underwater vehicles (AVs) that show collective cognition. Throughout 2015 – The Year of CoCoRo – we’ll be uploading a new weekly video detailing the latest stage in its development. This video shows a set of experiments that investigate the capability of the relay chain (formed by Lily robots) to transmit (relay) information between two spatially separated places.
The EU-funded Collective Cognitive Robotics (CoCoRo) project has built a swarm of 41 autonomous underwater vehicles (AVs) that show collective cognition. Throughout 2015 – The Year of CoCoRo – we’ll be uploading a new weekly video detailing the latest stage in its development. This video shows a set of experiments that investigate the capability of the relay chain (formed by Lily robots) to transmit (relay) information between two spatially separated places.
At one of these places we trigger a special RF (radio frequency) pulse to be emitted by a robot. Neighboring robots that receive this pulse send out a similar pulse, relaying the signal along the chain. To control the directionality of the spreading signal, there is also a refractory period after each relaying act in which the robot is unreceptive for the relayed signal. This system is inspired by slime mold amoebas and giant honeybees and serves very well for the underwater communication purpose.
tags: AUV, c-Research-Innovation, CoCoRo, EU, Swarming, UAV, underwater, video

AUAI is supported by:









