
Robohub.org
Video: Throwing and catching an inverted pendulum – with quadrocopters

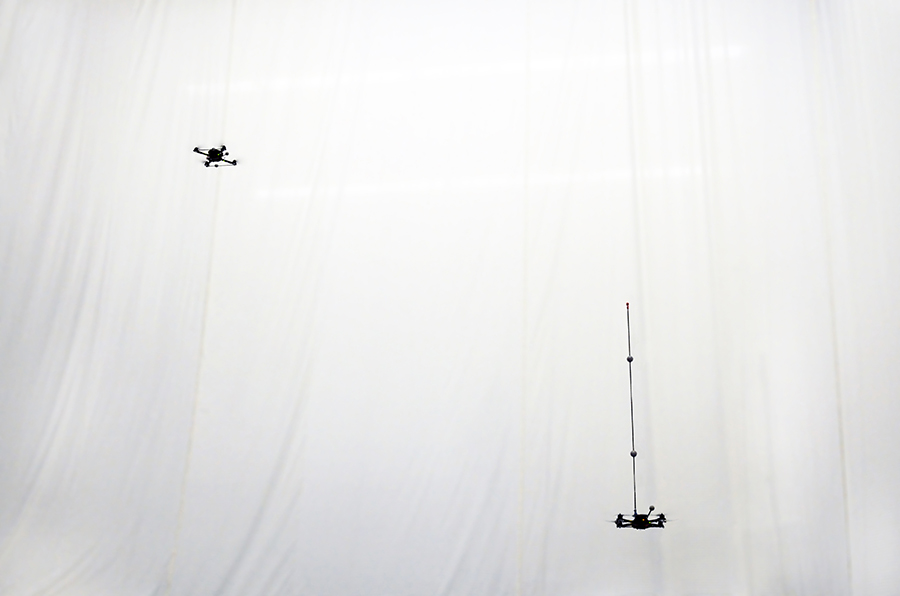
Two of the most challenging problems tackled with quadrocopters so far are balancing an inverted pendulum and juggling balls. My colleagues at ETH Zurich’s Flying Machine Arena have now combined the two.
As part of his Master thesis Dario Brescianini, student at ETH Zurich’s Institute for Dynamic Systems and Control, has developed algorithms that allow quadrocopters to juggle an inverted pendulum . If you are not sure what that means (or how that is even possible), have a look at his video “Quadrocopter Pole Acrobatics”:
(Don’t miss the shock absorber blowing up in smoke at 1:34!)
The Math

A quadrocopter with a plate for balancing the pole. The cross-shaped cut-outs are used for easy attachment to the vehicle and have no influence on the pendulum’s stability.
To achieve this feat, Dario and his supervisors Markus Hehn and Raffaello D’Andrea started with a 2D mathematical model. The goal of the model was to understand what motion a quadrocopter would need to perform to throw the pendulum. In other words, what is required for the pendulum to lift off from the quadrocopter and become airborne?
This first step allowed to determine (theoretical) feasibility. In addition, it showed the ideal trajectory in terms of positions, speeds, and angles the quadrocopter needed to follow to throw a pendulum. And it offered an insight into the throwing process, including identification of its key design parameters.
Reality Checks
The main goal of the next step was to determine how well the theoretic model described reality: How well does the thrown pendulum’s motion match the mathematical prediction? Does the pendulum really leave the quadrocopter at the pre-computed time? How does the pendulum behave while airborne? How well do assumptions for catching the pendulum (e.g., completely inelastic collisions, completely rigid pendulum, infinite friction between quadrocopter and pendulum when balancing) hold?
This second step involved multiple tests with the physical system, including throwing the pendulum by hand to study its aerodynamic properties and precisely timing the quadrocopters’ and pendulum’s motions during the maneuver.
Analyze, Experiment, Repeat

The shock absorber at the end of the pendulum is a balloon filled with flour and attached to a sliding metal cap with zip ties.
Armed with a good theoretical model and knowledge of its strengths and limitations, the researchers set out on a process of engineering the complete system of balancing, throwing, catching, and re-balancing the pendulum. This involved leveraging the theoretic insights on the problem’s key design parameters to adapt the physical system. For example, they equipped both quadrocopters with a 12cm plate that could hold the pendulum while balancing and developed shock absorbers to add at the pendulum’s tips.
This also involved bringing the insights gained from their initial and many subsequent experiments to bear on their overall system design. For example, a learning algorithm was added to account for model inaccuracies.
Dario writes:
This project was very interesting because it combined various areas of current research and many complex questions had to be answered: How can the pole be launched off the quadrocopter? Where should it be caught and – more importantly – when? What happens at impact?
The biggest challenge to get the system running was the catching part. We tried various catching maneuvers, but none of them worked until we introduced a learning algorithm, which adapts parameters of the catching trajectory to eliminate systematic errors.
The long and iterative process of this third step resulted in the final successful architecture to repeatedly throw and catch the pendulum on the real system, including three key components:
First, a state estimator was used to accurately predict the pendulum’s motion while in flight. Unlike the ball used in the group’s earlier demonstration of quadrocopter juggling, the pendulum’s drag properties depend on its orientation. This means, among other things, that a pendulum in free fall will move sideways if oriented at an angle. Since experiments showed that this effect was quite large for the pendulum used, an estimator including a drag model of the pendulum was developed.
This was important to accurately estimate the pendulum’s catching position.
Another task of the estimator was to determine when the pendulum was in free flight and when it was in contact with a quadrocopter. This was important to switch the quadrocopter’s behavior from hovering to balancing the pendulum.
Second, a fast trajectory generator was needed to quickly move the catching quadrocopter to the estimated catching position.
Third, a learning algorithm was implemented to correct for deviations from the theoretical models for two key events: A first correction term was learnt for the desired catching point of the pendulum. This allowed to capture systematic model errors of the throwing quadrocopter’s trajectory and the pendulum’s flight. A second correction term was learnt for the catching quadrocopter’s position. This allowed to capture systematic model errors of the catching quadrocopter’s rapid movement to the catching position.
The Result
As you can see in the video embedded above, at the end of Dario’s thesis two quadrocopters could successfully throw and catch a pendulum.
Many of the key challenge of this work were caused by the highly dynamic nature of the demonstration. For example, the total time between a throw and a catch is a mere 0.65 seconds, which is a very short time to move to, and come to full rest at, a catching position.
Another key challenge was the demonstration’s high cost of failure: a failed catch typically resulted in the pendulum hitting a rotor blade, with very little chance for the catching quadrocopter to recover. A crashed quadrocopter not only entailed repairs (e.g., changing a propeller), but also meant recalibration of the vehicle to re-determine its operating parameters (e.g., actual center of mass, actual thrust produced by propellors) and restarting the learning algorithms.
Says Markus Hehn:
This was a really fun project to work on. We started off with some back-of-the-envelope calculations, wondering whether it would even be physically possible to throw and catch a pendulum. This told us that achieving this maneuver would really push the dynamic capabilities of the system.
As it turned out, it is probably the most challenging task we’ve had our quadrocopters do. With significantly less than one second to measure the pendulum flight and get the catching vehicle in place, it’s the combination of mathematical models with real-time trajectory generation, optimal control, and learning from previous iterations that allowed us to implement this.
Note: The Flying Machine Arena is an experimental lab space equipped with a motion capture system.
Full disclosure: I work with Dario Brescianini, Markus Hehn, and Raffaello D’Andrea at ETH Zurich’s Institute for Dynamic Systems and Control.
More photos:

Credits: Carolina Flores, ETH Zurich 2012
If you liked this article, you may also be interested in:
- Three new quadrotor videos demonstrate agile control and the power of machine learning
- Live at TED Global 2013: Tweets, photos and video for quadrotor fans
- Behind the scenes at TED Global: Raffaello D’Andrea and team demo amazing quadrotor “athletes”
- Quadrocopters learn from prior experience to improve slalom flying
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: Algorithm Controls, c-Aerial, cx-Research-Innovation, Drone, ETH Zurich, Flying, IDSC, Industrial Other, quadrocopter, Raffaello D'Andrea, Research, review, Robotics technology, Swiss Robots, video

AUAI is supported by:









