
Robohub.org
The cheap arm project: An affordable, open-source robotics project
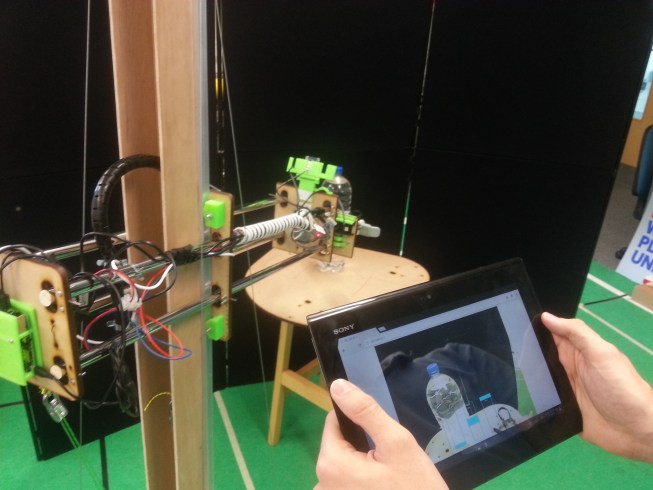
What do you get when you put together wood and rope? Well according to Plymouth University’s Professor Guido Bugmann: a low-cost, open source, 2 meter tall robot! All buildable for under £2000. The Cheap Arm Project (CHAP) began as an MSc project aimed at developing an affordable mobile robot arm system that could be used by wheelchair users to access daily objects at inaccessible heights or weights (the extreme case being 2 litre bottle).
Now the project has turned open source in the hope of continuing development and gathering more feedback. With the entire hardware and software details available online, with detailed instructions, the team hopes that community members will attempt to construct their own CHAP robot.
While building an entire robot may conventionally seem a complex and expensive undertaking, CHAP stands out with its use of 3D printed parts and wood. In fact, the “under £2000” price tag of required parts is primarily made up of the use six Dynamixel motors, each costing up to £200 and used by the project due to having numerous available during development. With this in mind, future work will look at the use of lower cost motors.
Rather than a robot ‘brain’, CHAP is powered by a human one. To accomplish this, CHAP’s Raspberry Pi was used to host a local web page to enable tele-operation from any connected device, all accessible through a WiFi hotspot also hosted by the Pi. This was an important design choice as it removed the need for platform specific apps and associated costs, simultaneously simplifying deployment and testing.
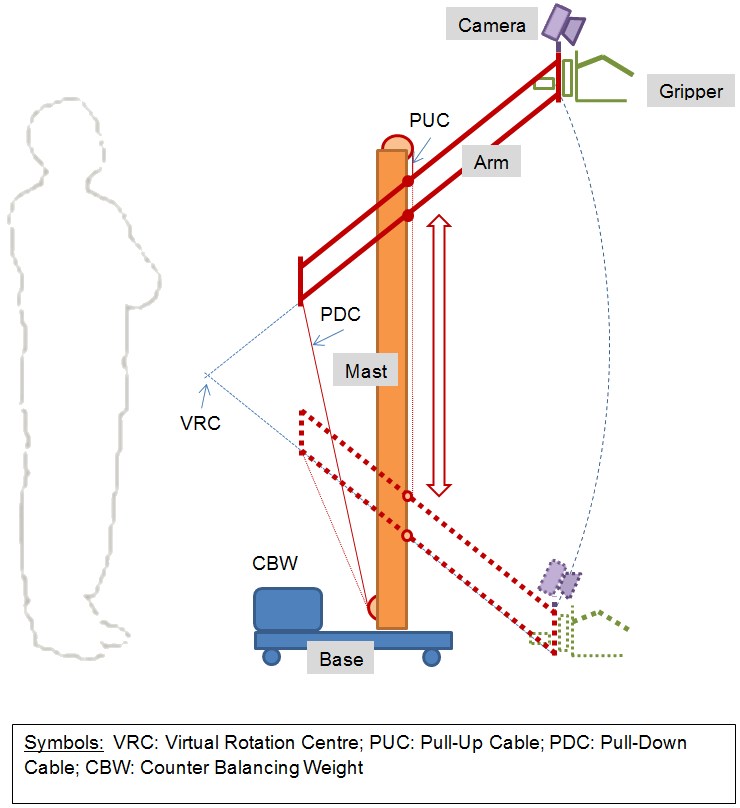
This was done deliberately to keep the design simple, and to allow users the freedom to interact with their world. Early user-tests discovered that some level of intelligence would be needed to simplify controls. With currently three joints, and three axis available; some steps are needed to automate object interaction (pull requests welcome!).

The next step for CHAP will be refinement of hardware and software; however the very first will be building a community! With full design documents available it is hoped that with support these can be improved and simplified, while simultaneously improving the effectiveness of the software.
Link to the github site can be found here: https://mobile-chap.github.io/Web/
tags: Actuation, Annoincement, c-Research-Innovation, cx-Education-DIY, DIY, Manipulation, modular, open source, Prototype, Research, robot, Service Household Rehabilitation




