
Robohub.org
250
Learning Prosthesis Control Parameters with Helen Huang
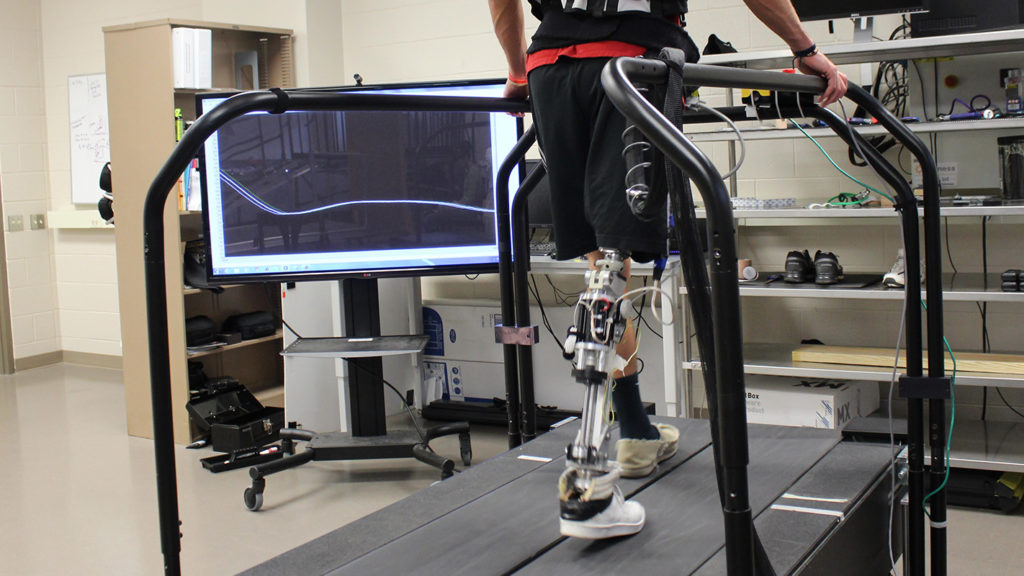
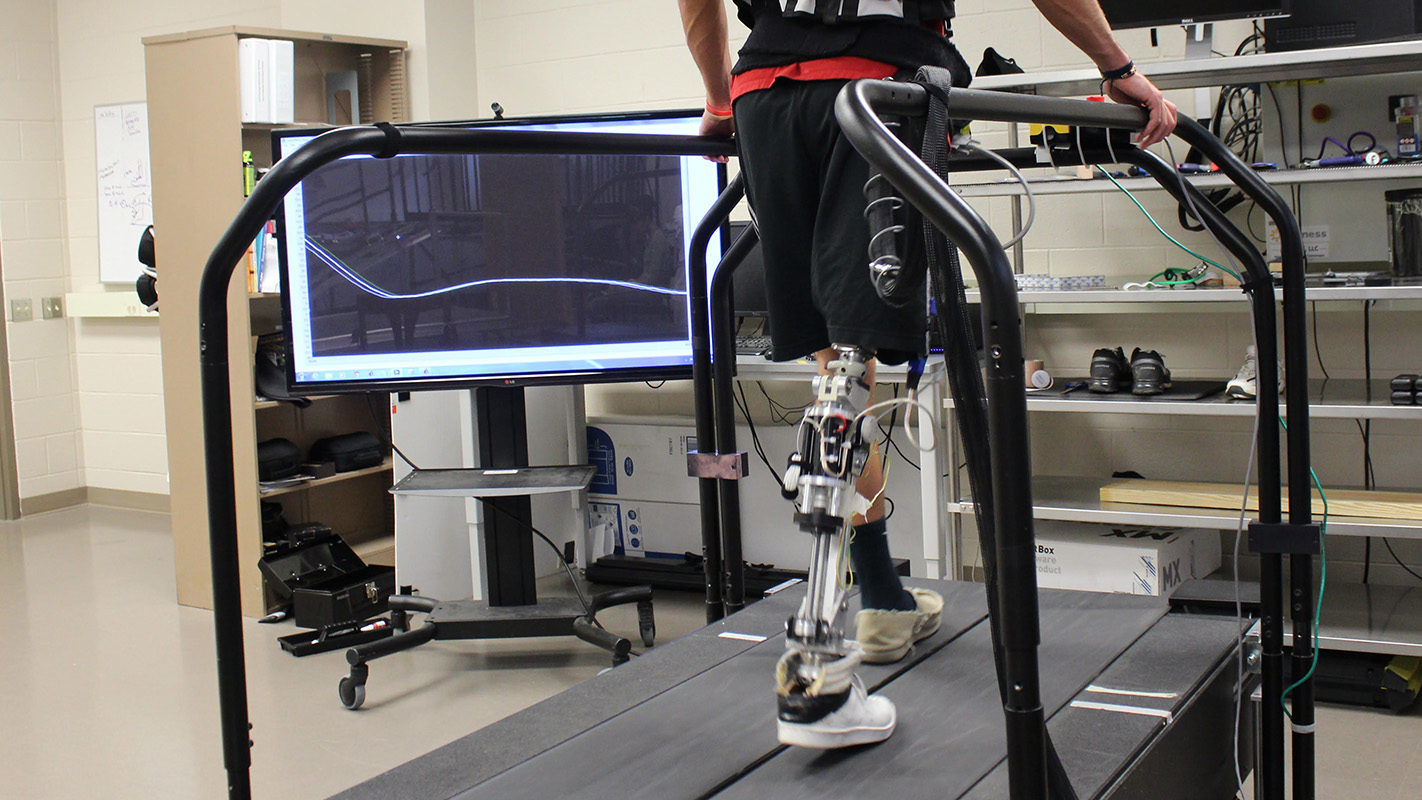
In this interview, Audrow Nash interviews Helen Huang, Joint Professor at the University of North Carolina at Chapel Hill and North Carolina State, about a method of tuning powered lower limb prostheses. Huang explains how powered prostheses are adjusted for each patient and how she is using supervised and reinforcement learning to tune prosthesis. Huang also discusses why she is not using the energetic cost of transport as a metric and the challenge of people adapting to a device while it learns from them.
Helen Huang

Helen Huang is a Professor in the Joint Department of Biomedical Engineering at the University of North Carolina at Chapel Hill (UNC) and North Carolina State University (NCSU) and the Director of the NCSU/UNC Closed-Loop Engineering for Advanced Rehabilitation (CLEAR) Core. Huang is interested in neural-machine interfaces for prostheses and exoskeletons, wearer-robot interaction, adaptive and optimal control of wearable robots, and human movement control. She has developed an EMG-based neural interface for robotic prosthetic legs. She was a recipient of the Delsys Prize for Innovation in Electromyography, the Mary E. Switzer Fellowship with the National Institute on Disability, Independent Living, and Rehabilitation Research (NIDILRR), and a NSF CAREER Award and was named NC State faculty scholar in 2015.
Links
- Huang’s research lab
- Download mp3 (19.9 MB)
- Subscribe to Robots using iTunes
- Subscribe to Robots using RSS
- Support us on Patreon
tags: Algorithm Controls, bio-inspired, c-Health-Medicine, podcast, Research, Robotics technology










