
Robohub.org
301
Listening like a Human, Playing like a Machine with Gil Weinberg
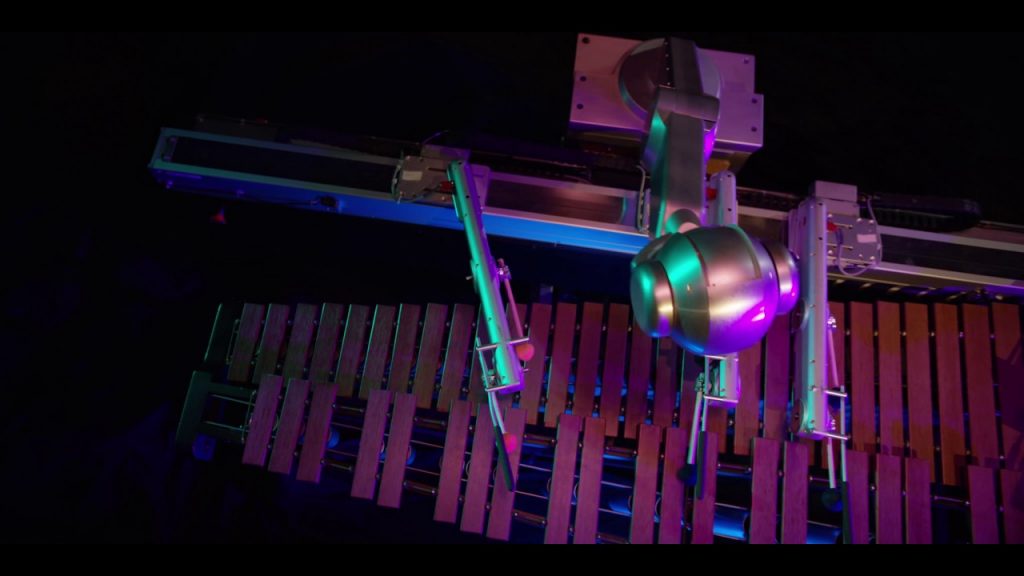
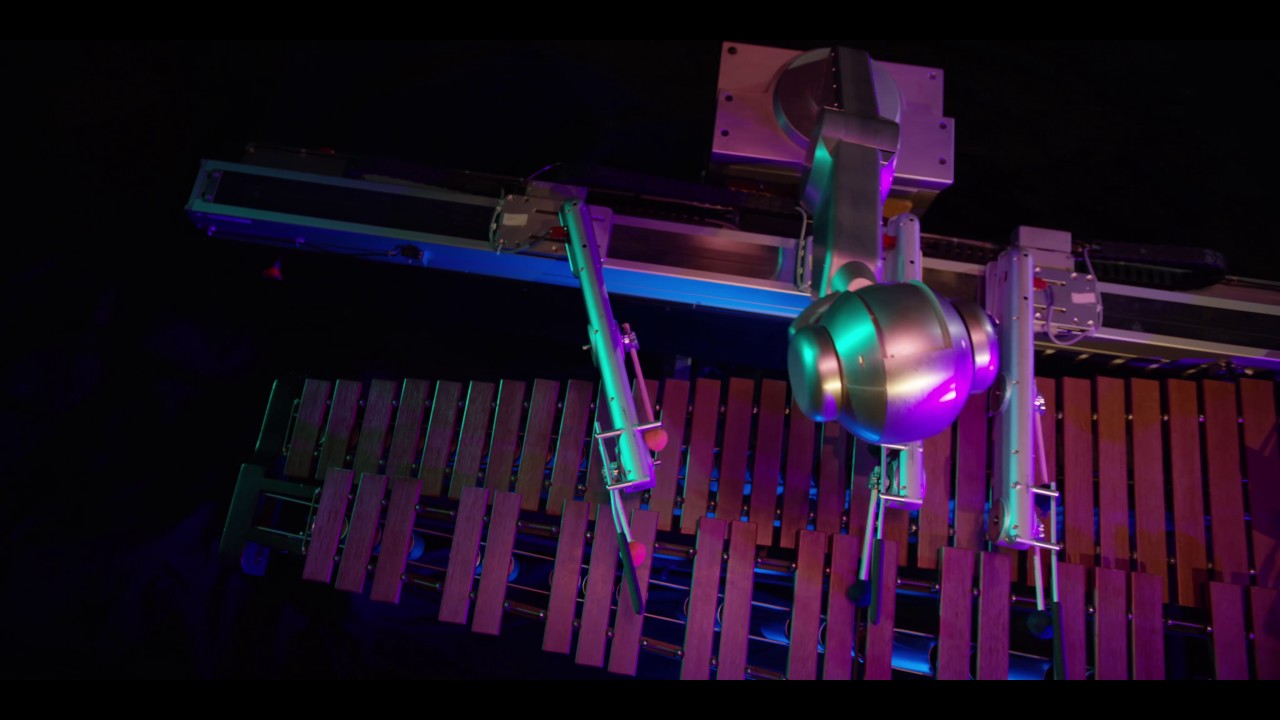
In this episode, our interviewer Audrow Nash speaks to Gil Weinberg, Professor in Georgia Tech’s School of Music and the founding director of the Georgia Tech Center for Music Technology. Weinberg leads a research lab called the Robotic Musicianship group, which focuses on developing artificial creativity and musical expression for robots and on augmented humans. Weinberg discusses several of his improvisational robots and how they work, including Shimon, a multi-armed robot marimba player, as well as his work in prosthetic devices for musicians.
Below is a video that includes Shimon on marimba, Jason Barnes playing drums with a prostetic, and Prof. Gil Weinberg on bass guitar.
Gil Weinberg
 Gil Weinberg is a professor in Georgia Tech’s School of Music and the founding director of the Georgia Tech Center for Music Technology, where he leads the Robotic Musicianship group. His research focuses on developing artificial creativity and musical expression for robots and augmented humans. Among his projects are a marimba playing robotic musician called Shimon that uses machine learning for jazz improvisation, and a prosthetic robotic arm for amputees that restores and enhances human drumming abilities. Weinberg has presented his work worldwide in venues such as The Kennedy Center, The World Economic Forum, Ars Electronica, Smithsonian Cooper-Hewitt Museum, SIGGRAPH, TED-Ed, DLD and others. His music has been performed with orchestras such as Deutsches Symphonie-Orchester Berlin, the National Irish Symphony Orchestra, and the Scottish BBC Symphony while his research has been disseminated through numerous journal articles and patents. Weinberg received his M.S. and Ph.D. in Media Arts and Sciences from MIT and his B.A. from the interdisciplinary program for fostering excellence in Tel Aviv University.
Gil Weinberg is a professor in Georgia Tech’s School of Music and the founding director of the Georgia Tech Center for Music Technology, where he leads the Robotic Musicianship group. His research focuses on developing artificial creativity and musical expression for robots and augmented humans. Among his projects are a marimba playing robotic musician called Shimon that uses machine learning for jazz improvisation, and a prosthetic robotic arm for amputees that restores and enhances human drumming abilities. Weinberg has presented his work worldwide in venues such as The Kennedy Center, The World Economic Forum, Ars Electronica, Smithsonian Cooper-Hewitt Museum, SIGGRAPH, TED-Ed, DLD and others. His music has been performed with orchestras such as Deutsches Symphonie-Orchester Berlin, the National Irish Symphony Orchestra, and the Scottish BBC Symphony while his research has been disseminated through numerous journal articles and patents. Weinberg received his M.S. and Ph.D. in Media Arts and Sciences from MIT and his B.A. from the interdisciplinary program for fostering excellence in Tel Aviv University.
Links
- Download mp3 (15.0 MB)
- Subscribe to Robots using iTunes
- Subscribe to Robots using RSS
- Support us on Patreon
tags: Actuation, Algorithm AI-Cognition, c-Research-Innovation, podcast, Research, Sensing










