
Robohub.org
Mind control: Correcting robot mistakes using EEG brain signals
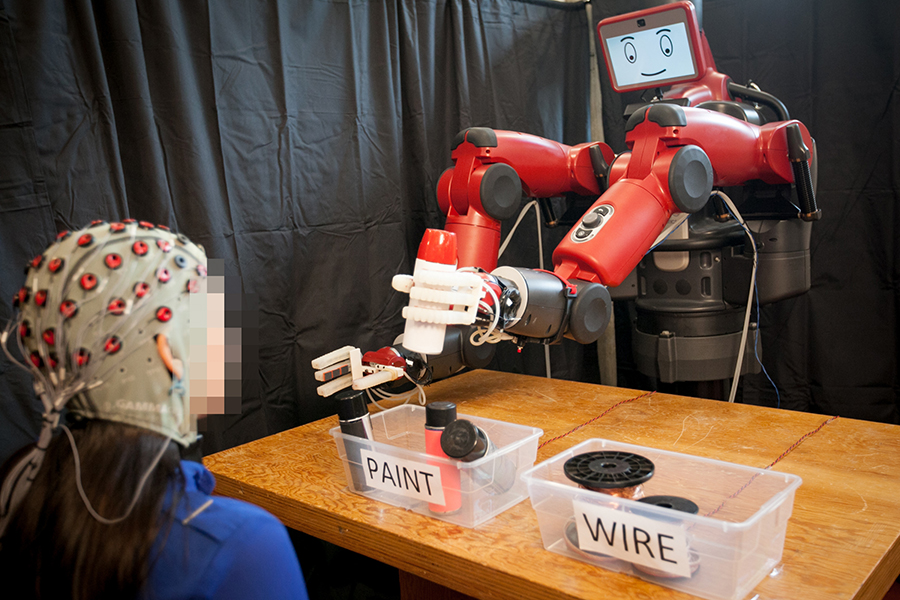
The feedback system enables human operators to correct the robot’s choice in real-time – Jason Dorfman, MIT CSAIL
For robots to do what we want, they need to understand us. Too often, this means having to meet them halfway: teaching them the intricacies of human language, for example, or giving them explicit commands for very specific tasks. But what if we could develop robots that were a more natural extension of us and that could actually do whatever we are thinking?
A team from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) and Boston University is working on this problem, creating a feedback system that lets people correct robot mistakes instantly with nothing more than their brains.
Using data from an electroencephalography (EEG) monitor that records brain activity, the system can detect if a person notices an error as a robot performs an object-sorting task. The team’s novel machine-learning algorithms enable the system to classify brain waves in the space of 10 to 30 milliseconds.
While the system currently handles relatively simple binary-choice activities, the paper’s senior author says that the work suggests that we could one day control robots in much more intuitive ways.
“Imagine being able to instantaneously tell a robot to do a certain action, without needing to type a command, push a button or even say a word,” says CSAIL director Daniela Rus. “A streamlined approach like that would improve our abilities to supervise factory robots, driverless cars and other technologies we haven’t even invented yet.”
In the current study the team used a humanoid robot named “Baxter” from Rethink Robotics, the company led by former CSAIL director and iRobot co-founder Rodney Brooks.
The paper presenting the work was written by BU PhD candidate Andres F. Salazar-Gomez, CSAIL PhD candidate Joseph DelPreto, and CSAIL research scientist Stephanie Gil under the supervision of Rus and BU professor Frank H. Guenther. The paper was recently accepted to the IEEE International Conference on Robotics and Automation (ICRA) taking place in Singapore this May.
Past work in EEG-controlled robotics has required training humans to “think” in a prescribed way that computers can recognize. For example, an operator might have to look at one of two bright light displays, each of which corresponds to a different task for the robot to execute.
The downside to this method is that the training process and the act of modulating one’s thoughts can be taxing, particularly for people who supervise tasks in navigation or construction that require intense concentration.
Rus’ team wanted to make the experience more natural. To do that, they focused on brain signals called “error-related potentials” (ErrPs), which are generated whenever our brains notice a mistake. As the robot indicates which choice it plans to make, the system uses ErrPs to determine if the human agrees with the decision.

The team uses EEG brain signals to detect if the person notices a mistake – Jason Dorfman, MIT CSAIL
“As you watch the robot, all you have to do is mentally agree or disagree with what it is doing,” says Rus. “You don’t have to train yourself to think in a certain way – the machine adapts to you, and not the other way around.”
ErrP signals are extremely faint, which means that the system has to be fine-tuned enough to both classify the signal and incorporate it into the feedback loop for the human operator.
In addition to monitoring the initial ErrPs, the team also sought to detect “secondary errors” that occur when the system doesn’t notice the human’s original correction.
“If the robot’s not sure about its decision, it can trigger a human response to get a more accurate answer,” says Gil. “These signals can dramatically improve accuracy, creating a continuous dialogue between human and robot in communicating their choices.”
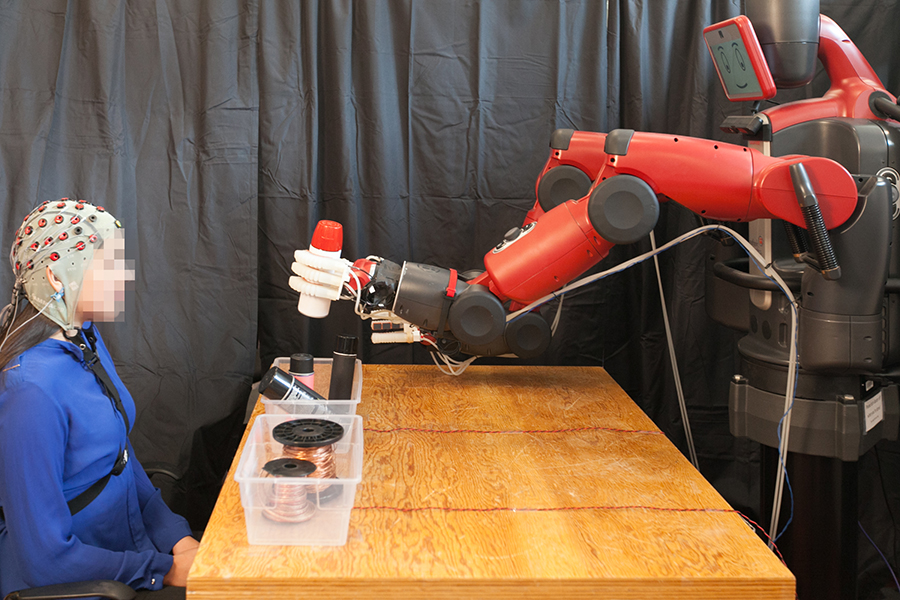
The feedback system enables human operators to correct the robot’s choice in real-time – Jason Dorfman, MIT CSAIL2
While the system cannot yet recognize secondary errors in real time, Gil expects the model to be able to improve to upwards of 90 percent accuracy once it can.
In addition, since ErrP signals have been shown to be proportional to how egregious the robot’s mistake is, the team believes that future systems could extend to more complex multiple-choice tasks.
Salazar-Gomez notes that the system could even be useful for people who can’t communicate verbally: a task like spelling could be accomplished via a series of several discrete binary choices, which he likens to an advanced form of the blinking that allowed stroke victim Jean-Dominique Bauby to write his memoir “The Diving Bell and the Butterfly.”
“This work brings us closer to developing effective tools for brain-controlled robots and prostheses,” says Wolfram Burgard, a professor of computer science at the University of Freiburg who was not involved in the research. “Given how difficult it can be to translate human language into a meaningful signal for robots, work in this area could have a truly profound impact on the future of human-robot collaboration.”
Read the paper here.
The project was funded in part by Boeing and the National Science Foundation.
If you enjoyed this article from CSAIL, you might also be interested in:
- MIT CSAIL’s 6-foot-tall NASA humanoid robot has landed
- Researchers add a splash of human intuition to planning algorithms
- Wearable AI that can detect the tone of a conversation
- Ingestible robots, glasses-free 3-D, and computers that explain themselves
- Design, simulate and build a custom drone
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: Algorithm AI-Cognition, Algorithm Controls, Annoincement, c-Research-Innovation, CSAIL, human-robot interaction, Manipulation, MIT, Prototype, Research, Robotics technology

AUAI is supported by:









