
Robohub.org
222
100/100 Computer Vision Challenge with Dieter Fox

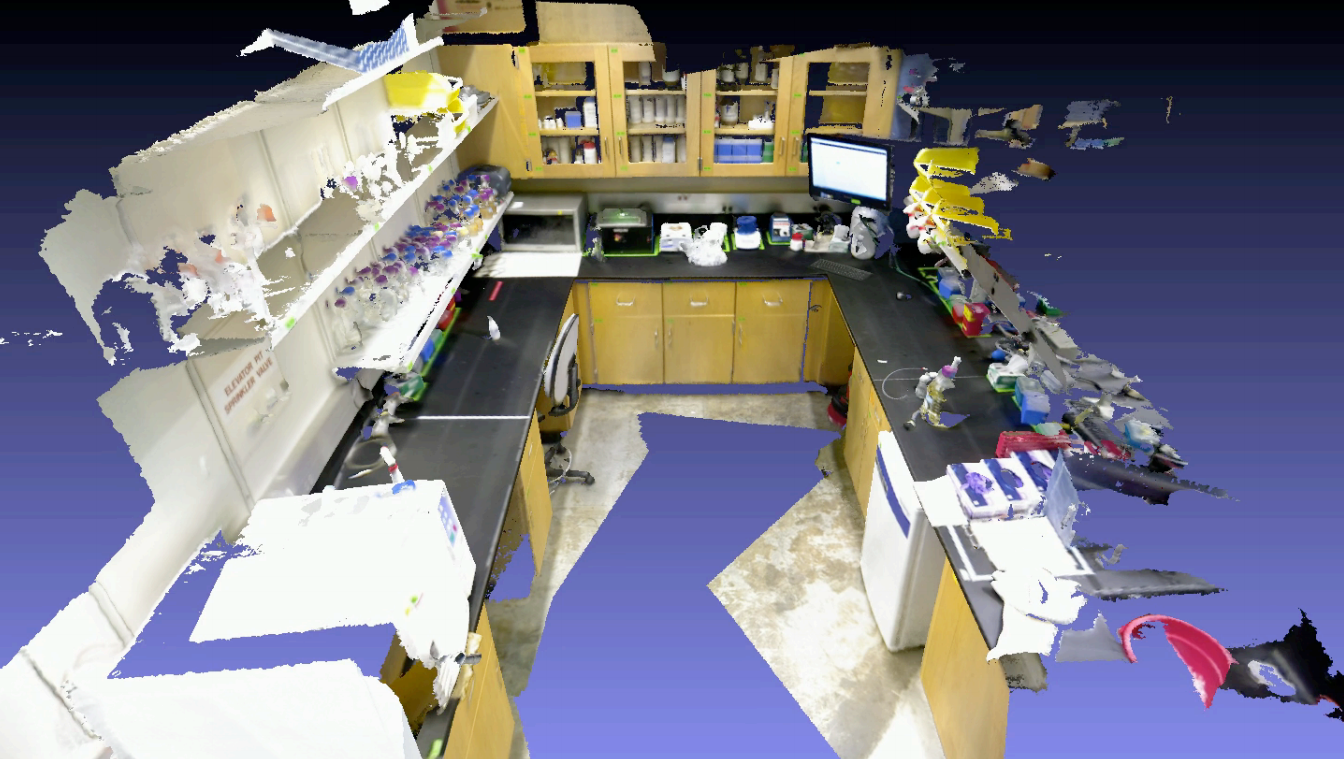
In this episode, Audrow Nash interviews Dieter Fox, Professor in the Department of Computer Science and Engineering at the University of Washington, about the 100/100 Computer Vision Tracking Challenge. This is a self-imposed challenge to understand 100% of the pixels in an image 100% of the time in video footage; this includes understanding semantic information. Such understanding would allow robots to assist humans more naturally in environments like a home kitchen, wet lab, or in disaster response. To accomplish this challenge, Fox discusses challenges which include modeling, tracking, and detecting articulated objects.
Fox’s Keynote at ICRA 2016 on the 100/100 tracking challenge:
Dieter Fox
 Dieter Fox is a German roboticist and a Professor in the Department of Computer Science & Engineering at the University of Washington, Seattle. He is most notable for his contributions to several fields including robotics, artificial intelligence, machine learning, and ubiquitous computing. Together with Wolfram Burgard and Sebastian Thrun he is a co-author of the book Probabilistic Robotics.
Dieter Fox is a German roboticist and a Professor in the Department of Computer Science & Engineering at the University of Washington, Seattle. He is most notable for his contributions to several fields including robotics, artificial intelligence, machine learning, and ubiquitous computing. Together with Wolfram Burgard and Sebastian Thrun he is a co-author of the book Probabilistic Robotics.
Links
tags: bio-inspired, c-Research-Innovation, podcast, Research, Robotics technology, software










