
Robohub.org
223
Actuation for Robotic Fingers with Edward Neff
In this episode, Abate De Mey interviews Edward Neff, founder of SMAC Corporation. Mr. Neff discusses how breakthroughs in his company have allowed them to develop linear actuators compact enough to be used to actuate robotic fingers. Companies like Apple and Samsung push for the development of robotic fingers to perform lifelike tests on their phones.
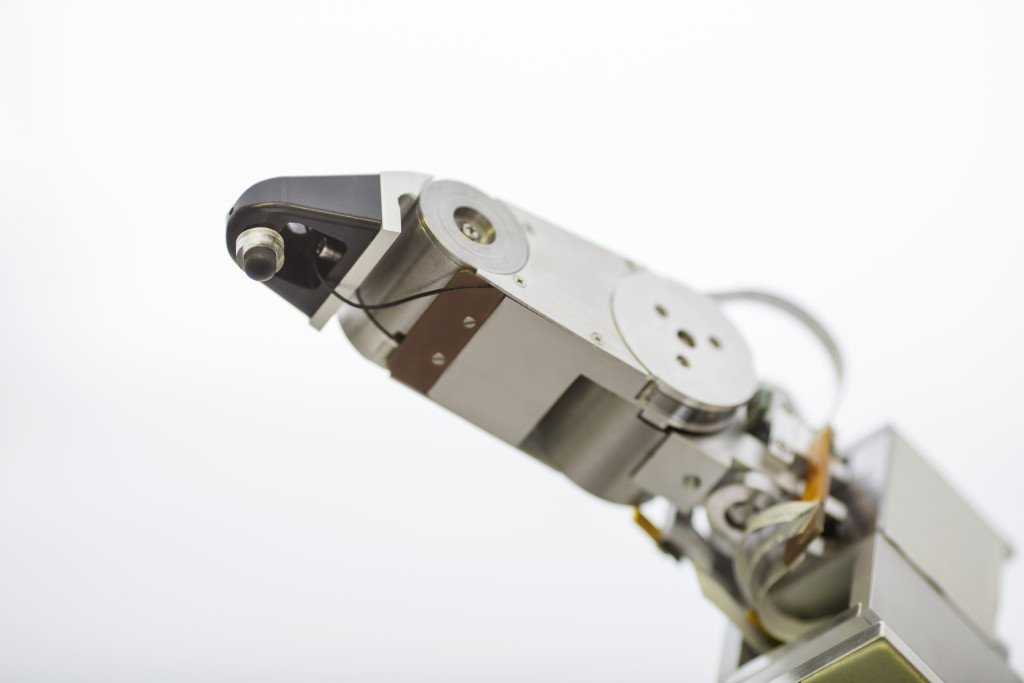
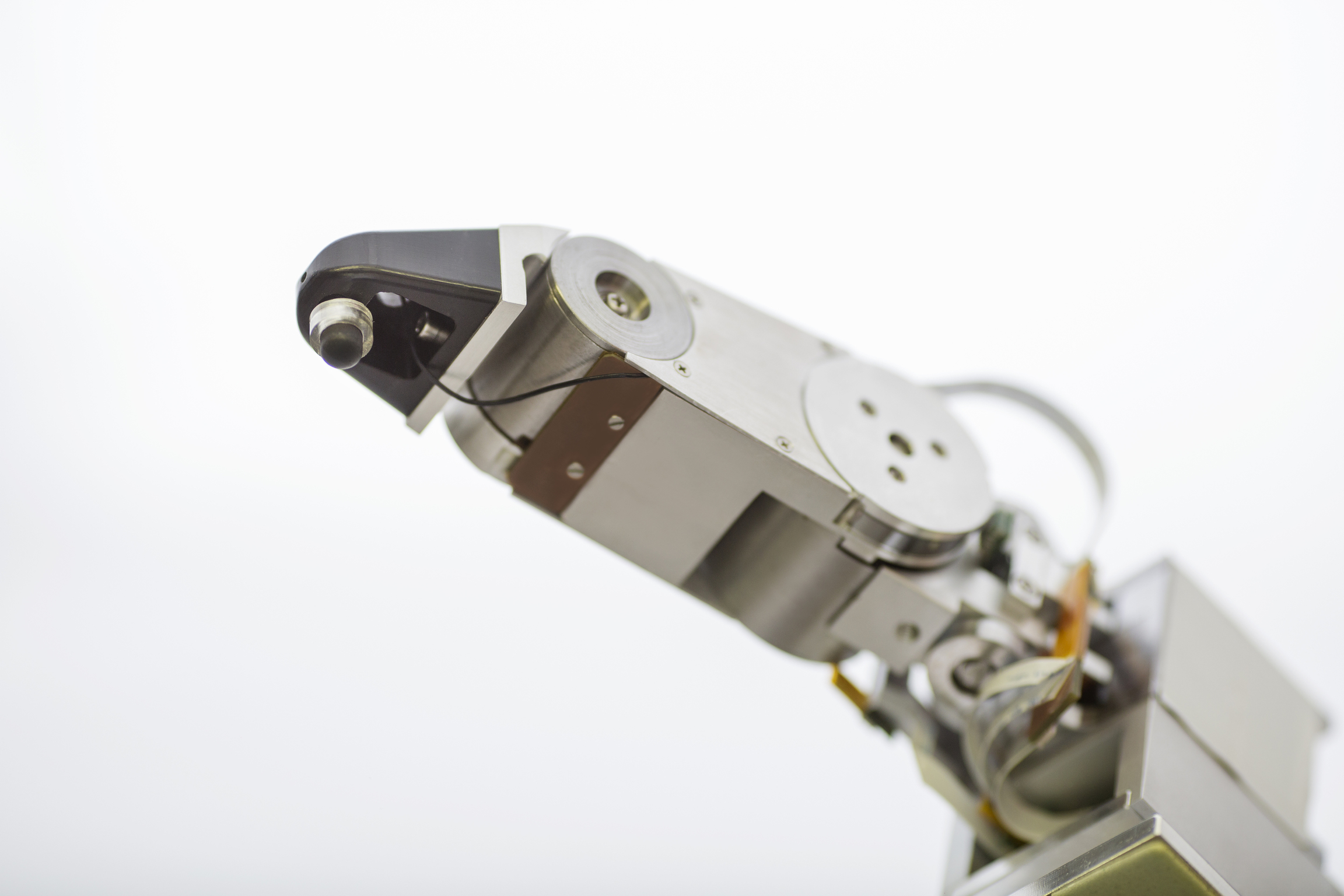
The robotic fingers developed using SMAC’s linear servo motors simulate a button press on a screen by employing a strong downwards force, as well as small sideways forces tangential to the screen. This mimics a realistic way that people interact with their touchscreens. The robotic fingers can also gently bump into surfaces, pull, and push objects. Other applications for these fingers include electronic circuit board assembly, and screwing bottle caps onto bottles.
Edward Neff

Edward Neff grew up in Birmingham, Michigan (USA) and is a graduate of the University of Michigan. He has a career history of managing automation companies in Belgium and Japan. Mr. Neff is the founder of SMAC Corporation in Carlsbad, California. SMAC is a leading manufacturer of precision programmable electric actuators. The company is planning a 2018 IPO. Mr Neff has over 40 patents in robotics and serves as a Director in BioTech and Medical Device companies.
Links
- SMAC Website
- Robotic Finger using a SmartPhone (YouTube)
- Robotic Finger at the Tokyo Robot Show (YouTube)
- Robotic Finger VS Human (YouTube)
- Smart Assembly Video (YouTube)
- Subscribe to Robots using iTunes
- Subscribe to Robots using RSS
tags: Actuation, bio-inspired, Business, c-Industrial-Automation, humanoid, Industrial Automation, Manipulation, podcast, Sensing










