
Robohub.org
Four-legged robot that efficiently handles challenging terrain
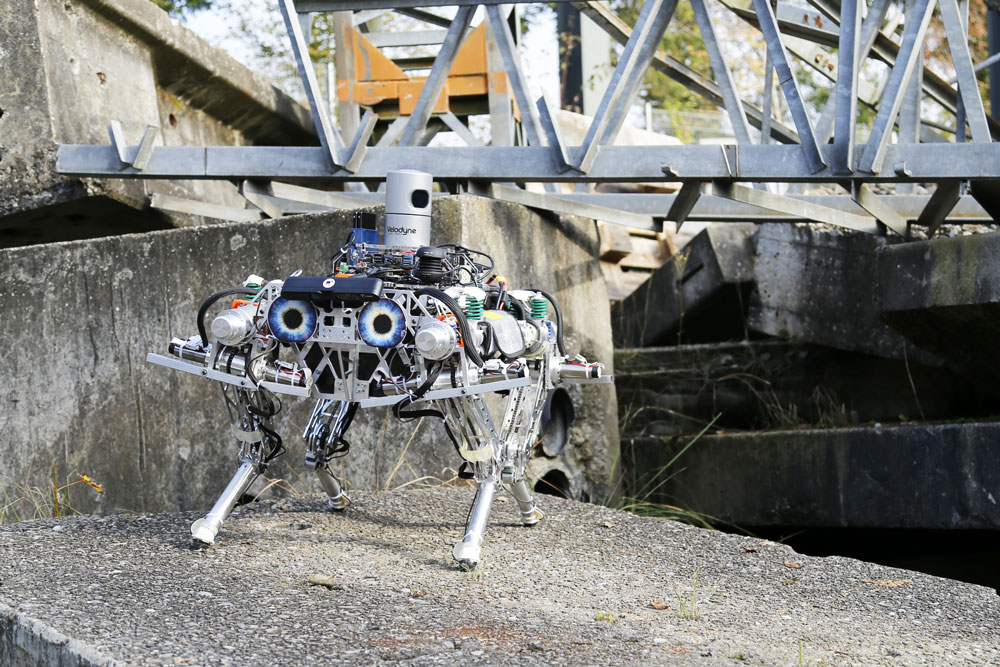
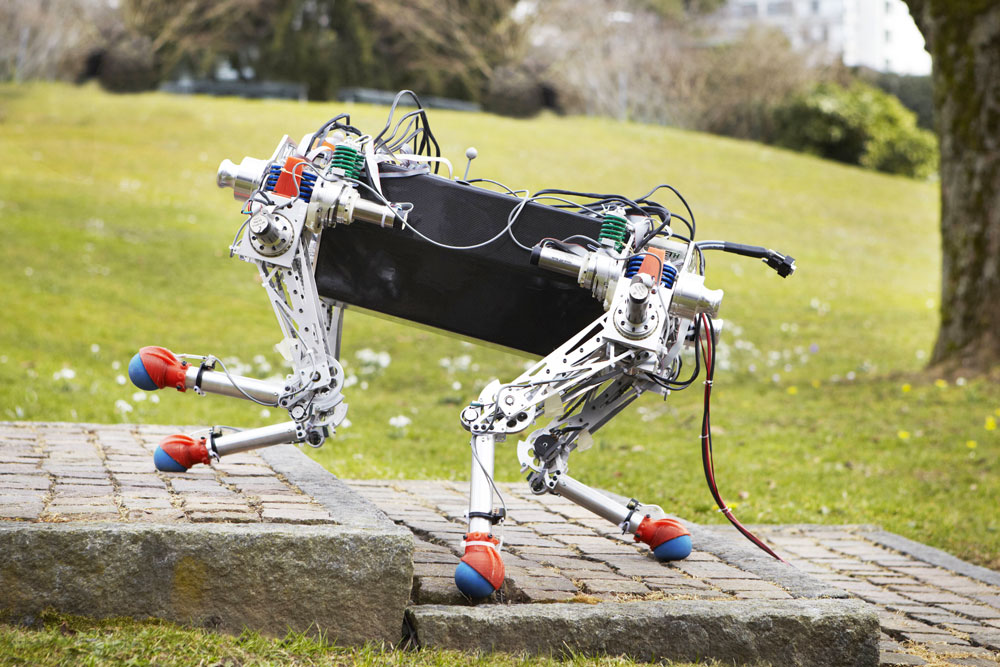 StarlETH is a multi-purpose legged transporter robot developed at ETH Zurich’s Autonomous Systems Lab. Combining versatility, speed, robustness, and efficiency, StarlETH walks, climbs, and runs over varied terrain.
StarlETH is a multi-purpose legged transporter robot developed at ETH Zurich’s Autonomous Systems Lab. Combining versatility, speed, robustness, and efficiency, StarlETH walks, climbs, and runs over varied terrain.
Precisely controlled elastic actuators allow for temporary energy storage – in fact this robotic system consumes 10 times less power than other hydraulic systems. Weighing in at just 26 kg, it can be handled by a single operator, but operates autonomously at a speed of 2km per hour walking or running. Potential applications for such a highly mobile robot include: inspection of industrial, construction, or polluted environments, search and rescue operations, security, or even the entertainment industry.
Further reading:
http://www.leggedrobotics.ethz.ch/doku.php?id=robots:starleth:starleth
http://www.leggedrobotics.ethz.ch/doku.php?id=robots:scarleth
http://www.leggedrobotics.ethz.ch/lib/exe/fetch.php?media=robots:starleth:description:201401_descriptiontransporter.pdf
If you liked this article, you may also be interested in:
- Air and ground robot collaborate to map and safely navigate unknown, changing terrain
- Robots Podcast #187: Cheetah 2, with Sangbae Kim
- Introducing Spot, a new smaller 4-legged robot from Boston Dynamics
- Firmer footing for robots with smart walking sticks
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: bio-inspired, c-Research-Innovation, ETH Zurich, quadruped, Switzerland, video
AUAI is supported by:









