
Robohub.org
248
Semi-active Prostheses with Peter Adamczyk
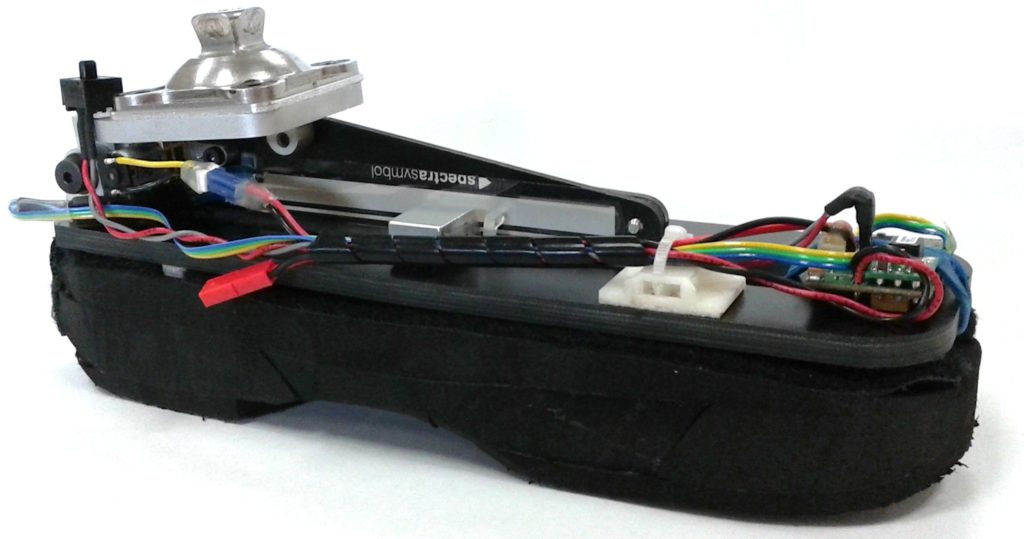
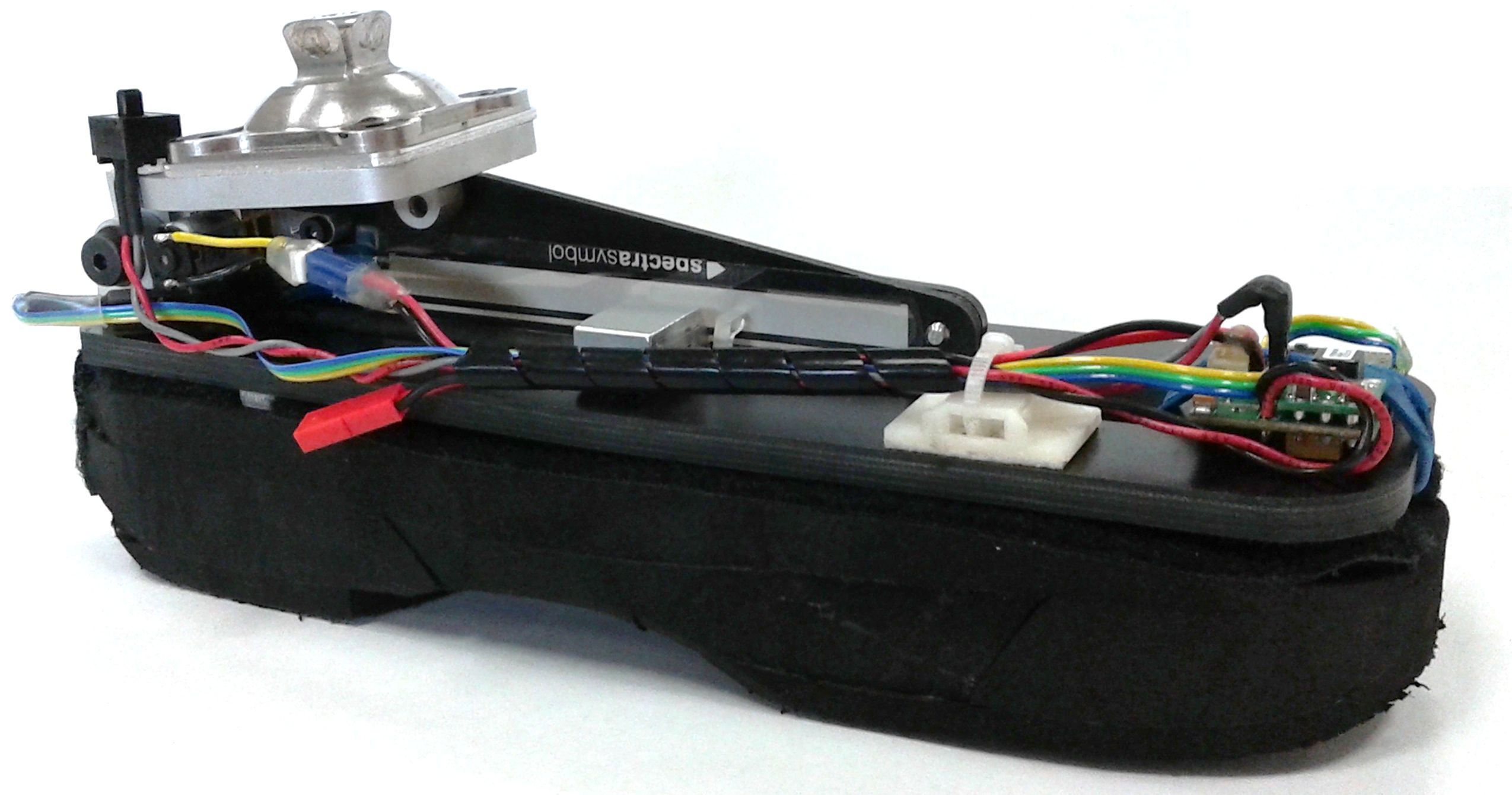
In this episode, Audrow Nash interviews Peter Adamczyk, Assistant Professor at the University of Wisconsin-Madison, on semi-active foot and ankle prostheses. The difference is that active below-knee prostheses work to move the person’s weight, emulating the calf muscle, while semi-active devices use small amounts of power to improve the performance of the prosthesis. Adamczyk discusses the motivation for semi-active devices and gives three examples: shiftable shapes, controllable keels, and alignable ankles.
Peter Adamczyk
 Peter Adamczyk directs the University of Wisconsin-Madison Biomechatronics, Assistive Devices, Gait Engineering and Rehabilitation Laboratory (UW BADGER Lab) which aims to enhance physical and functional recovery from orthopedic and neurological injury through advanced robotic devices.
Peter Adamczyk directs the University of Wisconsin-Madison Biomechatronics, Assistive Devices, Gait Engineering and Rehabilitation Laboratory (UW BADGER Lab) which aims to enhance physical and functional recovery from orthopedic and neurological injury through advanced robotic devices.
“We study the mechanisms by which these injuries impair normal motion and coordination, and target interventions to encourage recovery and/or provide biomechanical assistance. Our work primarily addresses impairments affecting walking, running, and standing. One core focus is advanced semi-active foot prostheses for patients with lower limb amputation. Additional research addresses assessment and rehabilitation of balance impairments, hemiparesis, and other neurologically-based mobility challenges.”
Links
tags: Actuation, c-Health-Medicine, podcast, Research, Robotics technology










