
Robohub.org
234
Trik Embedded Platform with Roman Luchin
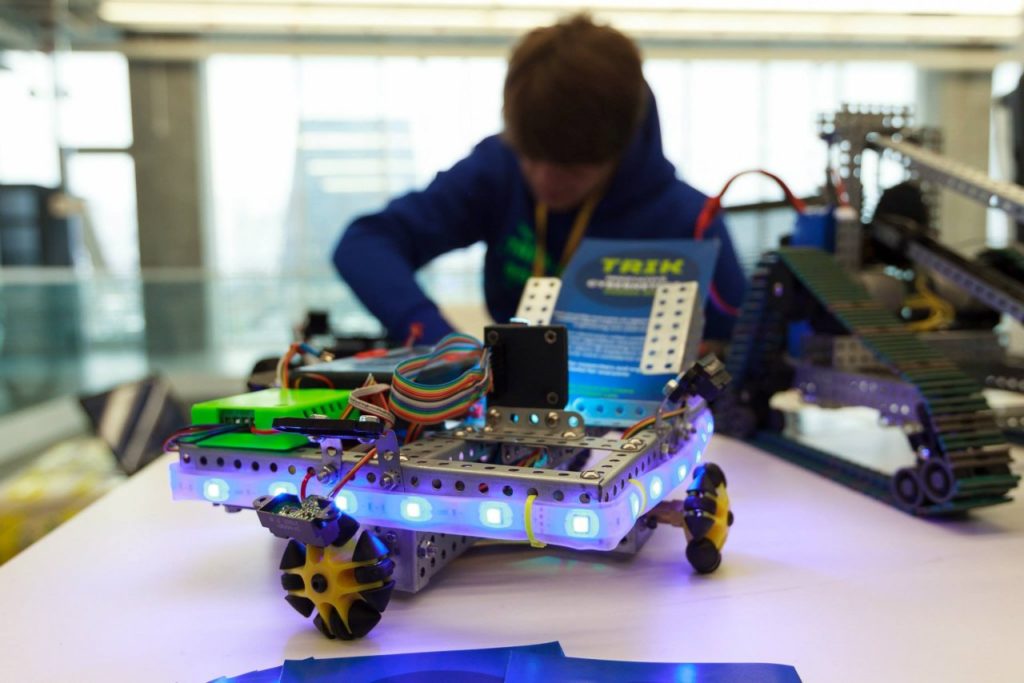
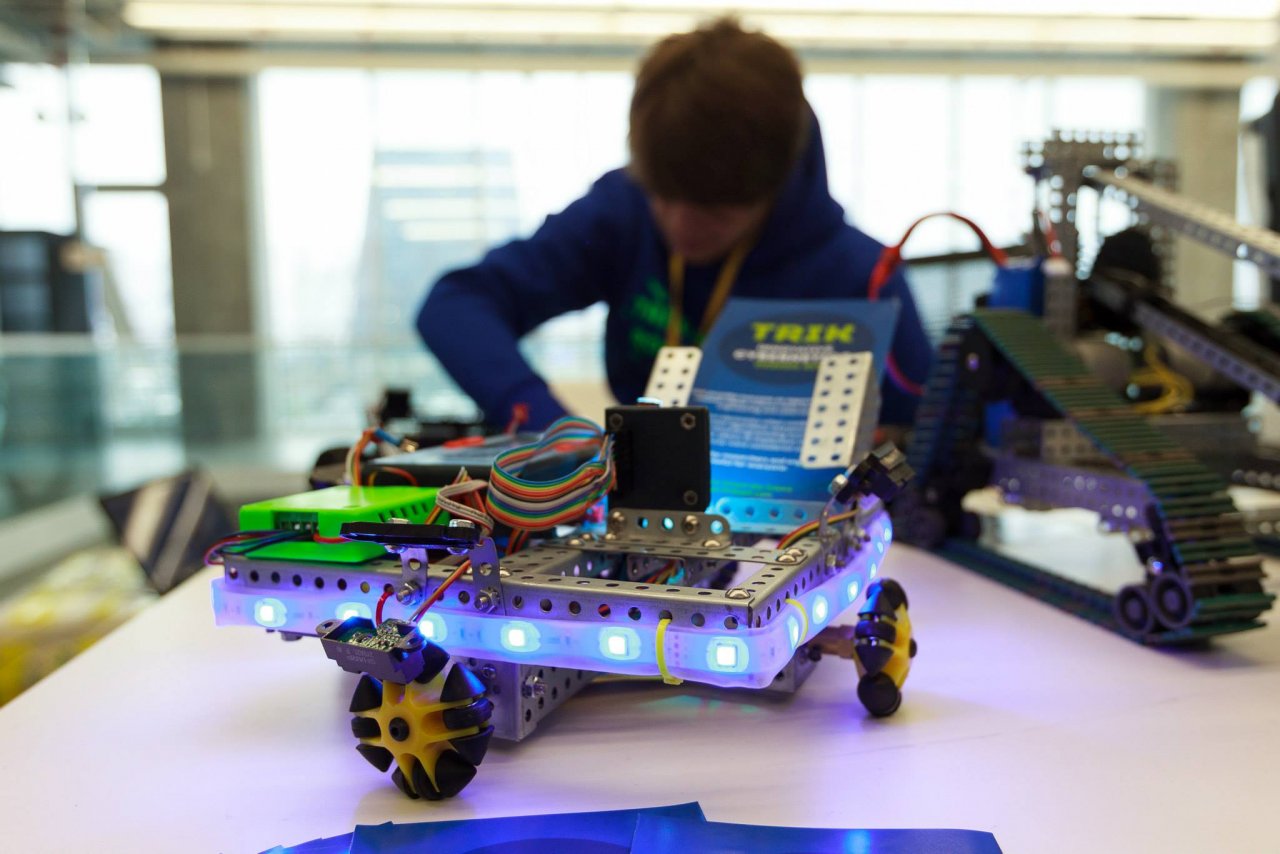
In this episode, Audrow Nash and Christina Brester conduct interviews at the 2016 International Association of Science Parks and Areas of Innovation conference in Moscow, Russia. They speak with Roman Luchin, CEO of CyberTech Labs., about a robotics development platform called Trik. Trik is intended to be an intermediate step when learning about robotics between Lego Mindstorms and programming on an embedded platform. Trik allows users to program with a graphical interface by ordering blocks. These blocks contain code in several common programming languages (python, F#, Pascal, etc.) and the code can be modified directly.
This is the second of three interviews from the conference.
Roman Luchin
 Roman Luchin is Founder of TRIK and CEO of CyberTech Labs in Russia. He started as a researcher in a laboratory of theoretical cybernetics in Saint Petersburg State University, where he developed multi-agent control systems. Faced with two challenges in Russian robotics, young professionals and outdated approaches, he decided to devote himself to the improvement of STEM education through robotics and the creation of new educational tools. As a result, he developed a unified cybernetic platform for education, research, and robotics projects called TRIK. There is a continuously growing community around TRIK, including universities, researchers, prototyping labs, and creative teams working to provide everyone with the opportunity to create modern intelligent robots that can “see”, “hear” and collaborate.
Roman Luchin is Founder of TRIK and CEO of CyberTech Labs in Russia. He started as a researcher in a laboratory of theoretical cybernetics in Saint Petersburg State University, where he developed multi-agent control systems. Faced with two challenges in Russian robotics, young professionals and outdated approaches, he decided to devote himself to the improvement of STEM education through robotics and the creation of new educational tools. As a result, he developed a unified cybernetic platform for education, research, and robotics projects called TRIK. There is a continuously growing community around TRIK, including universities, researchers, prototyping labs, and creative teams working to provide everyone with the opportunity to create modern intelligent robots that can “see”, “hear” and collaborate.
Links
- Download mp3 (16.5 MB)
- IASP 2016 conference website
- Skolkovo’s robotics page
- Trik’s homepage
- Subscribe to Robots using iTunes
- Subscribe to Robots using RSS
tags: Actuation, Algorithm Controls, Interview, open source, Prototype, Research, Robotics technology, software, startup











