
Robohub.org
Raffaello D’Andrea at TED2016: Novel flying machines and swarms of tiny flying robots
Last week Raffaello D’Andrea, professor at the Swiss Federal Institute of Technology (ETH Zurich) and founder of Verity Studios, demonstrated a whole series of novel flying machines live on stage at TED2016: From a novel Tail-Sitter (a small, fixed-wing aircraft that can optimally recover a stable flight position after a disturbance and smoothly transition from hover into forward flight and back), to the “Monospinner” (the world’s mechanically simplest flying machine, with only a single moving part), to the “Omnicopter” (the world’s first flying machine that can move into any direction independent of its orientation and its rotation), to a novel fully redundant quadrocopter (the world’s first, consisting of two separate two-propeller flying machines), to a synthetic swarm (33 flying machines swarming above the audience).
Most of D’Andrea’s work shown at this latest demonstration is dedicated to pushing the boundary of what can be achieved with autonomous flight. One key ingredient is localization: To function autonomously, robots need to know where they are in space. Previously his team has relied on an external high-precision motion capture system available in his Flying Machine Arena at ETH Zurich for positioning. In his previous TED talk on robot athletes for example, you can clearly see the reflective markers required by the motion capture system. This meant that most algorithms were difficult to demonstrate outside the lab. It also meant that the system had a single point of failure (SPOF) in the centralized server of the mocap system — a highly problematic point for any safety critical system.
In another world first, Raff and his team are now showing a newly developed, doubly redundant localization technology from Verity Studios, a spin-off from his lab, which gives flying machines, and robots in general, new levels of autonomy. For the live demonstrations, all flying machines use on-board sensors to determine where they are in space and on-board computation to determine what their actions should be. There are no external cameras. The only remote commands the flying robots receive are high level ones, such as “take-off” or “land”.
The nature of this performance was also unprecedented in that it did not use safety nets to separate the audience from the action, and in that it even saw dozens of vehicles fly directly above the audience.
The performance included demonstrations of various safety systems for flying machines, including a large, high-performance quadcopter that is fully redundant and that utilizes a state-of-the-art failsafe algorithm (see previous Robohub article) among its many other onboard and offboard safety features.
Following extensive technical discussions on the various failure modes of the positioning system and of each flying machine as well as on the systems’ numerous redundancies and safety features, the organizers of TED had full faith in the systems’ safety and reliability. So much so that they decided to indemnify the venue against any lawsuits to overcome its ban on drones.
Here is the video:
And here is a more in-depth breakdown of what you are seeing, based on a transcript of the presentation and information from Raff D’Andrea’s team:
Intro video – Institute for Dynamic Systems and Control (IDSC), ETH Zurich
The video shows some of the previous work of D’Andrea’s group on aerial construction: A 6-meter tall tower built out of 1500 foam bricks by four autonomous quadcopters over a three day period in front of a live audience and a rope bridge built by three autonomous quadcopters in the Flying Machine Arena.
Live demo 1: Tail-Sitter – IDSC, ETH Zurich

The Tail-sitter. Photo: Bret Hartman / TED
“This is a so-called tail-sitter. It’s an aircraft that tries to have its cake and eat it: Like other fixed wing aircraft, it is efficient in forward flight, much more so than helicopters and variations thereof. Unlike most other fixed wing aircraft, however, it can hover, which has huge advantages for take-off, landing, and general versatility. There is no free lunch, unfortunately, and one of the challenges with this type of aircraft is its susceptibility to disturbances, such as wind-gusts, while hovering. We are developing control architectures and algorithms that address this limitation. [Pushes the vehicle, then grabs it and throws it] The idea is to allow the aircraft to autonomously recover no matter what situation it finds itself in. [Second throw] And through practice, improve its performance over time. [Third throw, violently spinning the vehicle]”
Demo 2 (video of demo the night before): Monospinner – IDSC, ETH Zurich

The Monospinner. Photo: Marla Aufmuth / TED
“When doing research we often ask ourselves abstract, fundamental questions that try to get at the heart of a matter. One such question: What is the minimum number of moving parts necessary for controlled flight? This line of exploration may have practical ramifications; take helicopters, for example, which are affectionately known as “machines with over 1000 moving parts all conspiring to cause bodily harm”. Turns out that decades ago skilled pilots were flying RC airplanes with only 2 moving parts: a propeller and a tail rudder. We recently discovered that it could be done with only 1.”
“This is the monospinner, the world’s mechanically simplest, controllable flying machine, invented just a few months ago. It has only one moving part, a propeller. There are no flaps or hinges, no control surfaces or valves, no other actuators. Just one propeller. Even though it is mechanically simple, there is a lot going on in its electronic brain to keep it stable and move through space in a controllable fashion. Even so, it does not yet have the recovery algorithms of the tail-sitter, which is why I have to throw it just right.”
Live demo 3: Omnicopter – IDSC, ETH Zurich:

The Omnicopter. Photo: Bret Hartman / TED
“If the monospinner is an exercise in frugality, this machine here, the omnicopter, with its 8 propellers, is an exercise in excess. What can you do with this surplus? The thing to notice is that it is highly symmetric, and as a result it is ambivalent to orientation. This gives it an unprecedented capability: It can move anywhere in space, independently of where it is facing, and even of how it is rotating. It has its own complexities, mainly due to the complex, interacting flows of its 8 propellers. Some of this can be modeled, while the rest can be learned on the fly. [Omnicopter takes off, manoeuvres around the stage, lands]”
Live demo 4: Fully redundant multicopter – Verity Studios

Fully redundant quadcopter. Photo: Ryan Lash / TED
“If flying machines are going to find their way into our daily lives, they will need to become extremely safe. This machine here is a prototype being developed by Verity Studios. It actually consists of two separate, two propeller flying machines, each capable of controlled flight. One wants to rotate clockwise, the other one counter clockwise. When all systems are operational, it behaves like a high-performance, 4 propeller quadrocopter. [Quadcopter takes off and flies an arc across the stage] If anything fails, however – propeller, motor, electronics, even a battery pack – it is still able to fly, albeit in a degraded way [One half of the quad is de-activated, the quadrocopter starts to spin and fall, the failsafe mode kicks in and the quadrocopter recovers, flies to the back of the stage, and performs a controlled landing at the takeoff spot].”
Live demo 5: Synthetic swarm, 33 small flying machines – Verity Studios

Photo: Bret Hartman / TED
“This last demonstration is an exploration of synthetic swarms. The large number of coordinated autonomous entities offers a radically new palette for aesthetic expression. We have taken commercially available micro-quadrocopters, each weighing less than a slice of bread, and equipped them with our localization technology and custom algorithms. Because each unit knows where it is in space and is self-controlled, there really is no limit to their number. [Swarm performance]”
Raffaello D’Andrea wrapped up with: “Hopefully these demonstrations will motivate you to dream up new revolutionary roles for flying machines. For example, the ultra-safe flying machine [points to the fully redundant multicopter] has aspirations to become a flying lampshade on Broadway. The reality is that it is difficult to predict the impact of nascent technology. And for folks like us, the real reward is the journey, and act of creation. It is also a continual reminder of how wonderful and magical the universe we live in is; that it permits clever, creative creatures to sculpt it in such spectacular ways. The fact that this technology has huge commercial potential is just icing on the cake.”
More photos for your viewing pleasure:

Photo: Bret Hartman / Ryan Lash / TED
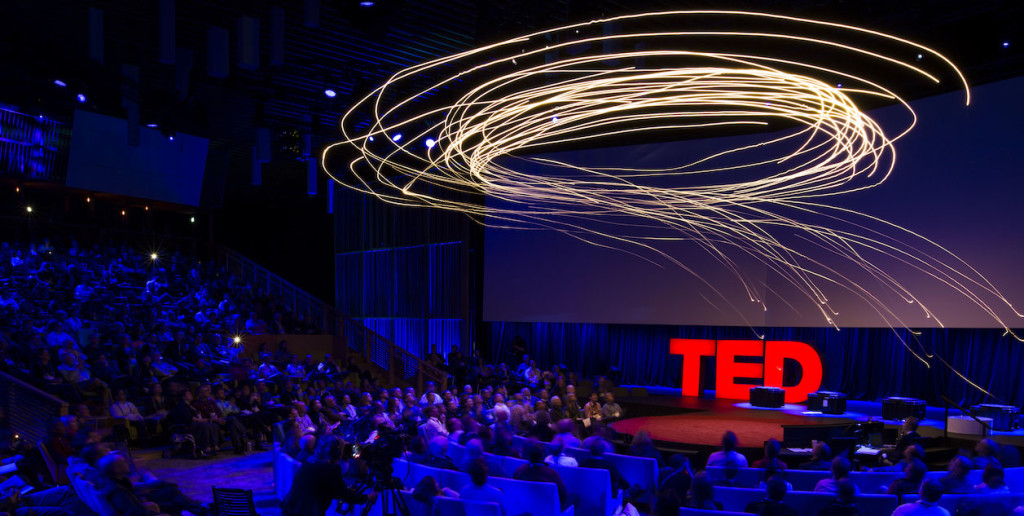
Photo: Bret Hartman / Ryan Lash / TED

Photo: Bret Hartman / Ryan Lash / TED
Photo: Steven Rosenbaum / Waywire
tags: Actuation, Algorithm Controls, Business, c-Aerial, cx-Events, education, entertainment, ETH Zurich, Event, Flying, Micro, Person, Prototype, Research, Sensing, Service Professional Other, startup, Swarming, video

AUAI is supported by:









